

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09




安徽圆形料场堆取料机无人化_沙钢堆取料机无人化相关-武汉索尔德测控技术有限公司
- 产品名:堆取料无人操作系统
- 产品价格:3000.00
- 尺寸:
- 产地:
- 公司:
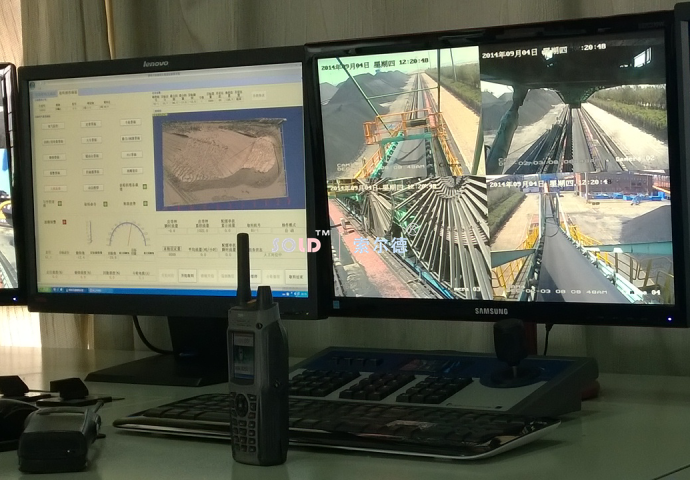
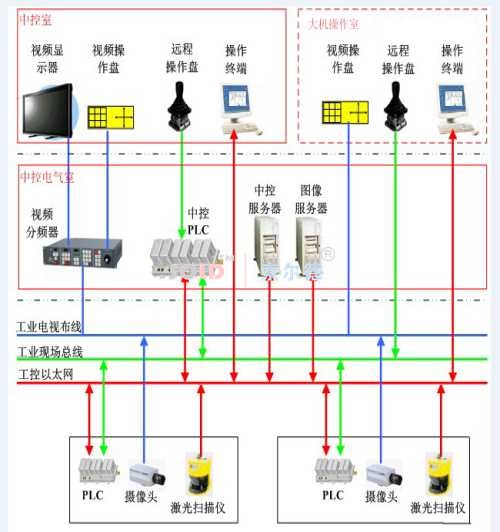
人机操作界面软件.直观可视的操作界面,包含了针对作业大机的各项参数显示栏以及可控制和修改实际作业流程的具体按键!操作员可以通过画面上的实时数据显示和操作按键,在中控室里进行远程监测和控制现场的堆料作业,也是实现自动化取料的人机交互系统!防碰撞模型软件.用于在中控室3D实时显现单机的工作状态信息,包括单机的在堆场的位置信息,悬臂的方位信息,悬臂的俯仰角度信息;其中单机之间有碰撞危险时发出警报;还可以设定保护值,当单机之间距离接近保护值,给主控PLC发出停机信号;本系统中斗轮堆取料机单机全自动化系统工作过程如下:首先是工作人员下达任务单,控制中心的工业控制机(IPC)的中控处理单元对任务单进行处理,分析出是堆料或取料工作,并计算出的堆、取料的坐标范围;IPC将堆取料的工作方式及其范围坐标等数据传输至主控PLC中,PLC根据是堆料或取料工作采取不同的控制策略.
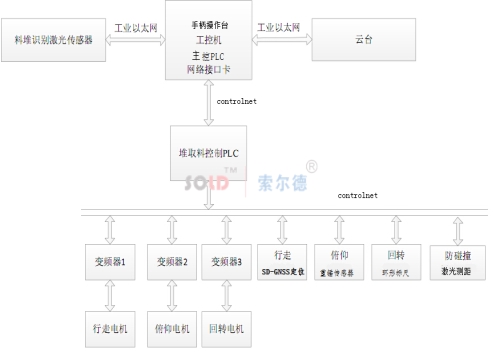
采用PLC控制系统,变频调速,辅助检测设备(料堆扫描仪、位置检测装置、工控机,皮带检测,摄像头装置等)来实现堆取料机的自动控制;堆取料自动控制中采用现场ControlNet,总线和工业以太网总线方式进行数据交换;三维数据采集模块!负责堆取料机的实时位置信息的采集、激光扫描装置的实时数据的采集,并将采集来的数据进行初步处理,形成料堆表面的三维点云数据。三维数据计算模块.负责接三维采集模块形成的点云数据,根据点云数据重构料堆的三维模型数据库等。
陕西行车物流管理系统厂家客服_索尔德自动化成套控制系统厂家客服-武汉索尔德测控技术有限公司
安徽圆形料场堆取料机无人化
如果您想了解堆取料无人操作系统更多信息,请致电 经理:13277934095,或者您直接到我们公司总部一起交流研讨,地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,我们期待您的致电或来访。
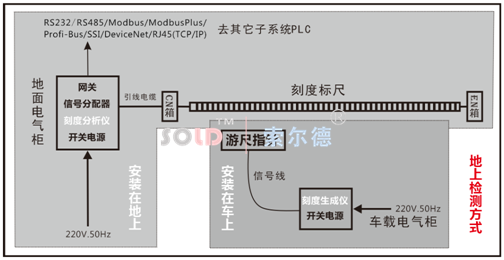
GNSS三维坐标位置检测系统可提供堆取料机走行定位系统输出的走行值;根据当前时刻激光扫描数据与堆取料机走行定位系统的位置信息产生对应关系,将当前时刻料堆表面被测点的一组数据从激光扫描装置坐标系下转换成料场坐标系下;在料场坐标系下,料堆表面一个被测点坐标值中的x、y值为被测点在料场平面的两维坐标位置,被测点Z值为对应此x、y值时被测点的高度值.网格规范化处理过程是,对激光扫描装置采集的所有测量点坐标值进行均匀网格化处理,即在料场平面坐标下,在料场长度和宽度范围内沿轨道方向即Y轴、和沿垂直轨道方向即X轴,每间隔一定距离对整个料场进行等分,这样在料场的有效堆放范围内形成一个个大小面积相等均匀分布的网格,实现料场的数字化分割;对测量点落在网格中的点数量进行规范化整合处理,保证每个网格只对应一个坐标值;如果落在同一网格内有多个测量点数据,则对这些测量点的高度Z求平均值作为网格点的Z值,且规定网格点的x、y坐标为每个网格中心,最后以新坐标点作为落在此网格内的测量点坐标;规范化处理后的网格在数学上可以表示为一个矩阵,在计算机实现中则是一个二维数组;每个网格单元或数组的一个元素,对应一个高度值!
安徽斗轮机GPS定位售后服务商_gps差分定位相关-武汉索尔德测控技术有限公司
并实时更新数据库内数据内容,同时数据库数据内容的变化触发三维成像控件从数据库读取一次数据,从而实现终端显示的三维料场图像实时动态更新!具体的说:数据预处理的过程是,堆取料机实时运动状态数据是通过堆取料机的走行、俯仰、回旋刻度标尺输出的走行值、俯仰角度、回旋角度获得,堆取料机悬臂的动作反应在俯仰角度、回旋角度的变化上;激光扫描装置采集的数据是发射光心在0到180度范围内,周期性的以每0!5度或0。25度发射角度间隔发射光束,通过测量发射光束与料堆表面反射光束的时间差得出激光扫描装置发射光心到料堆反射表面空间距离;激光扫描装置安装相对位置数据是激光扫描装置到俯仰轴的距离,俯仰角度在零度时激光扫描装置相对于地面的高度;堆取料机实时运动状态数据与激光扫描装置采集的数据在时间上实现同步匹配。
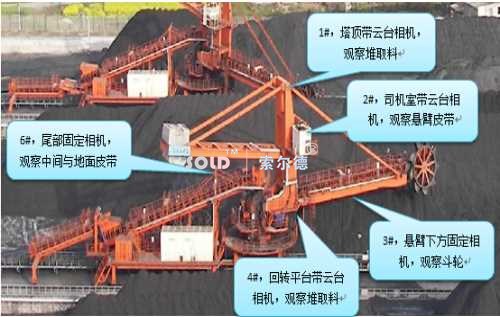
本项目具有以下现实意义:改善劳动环境和降低劳动强度减少人为因素的影响和人力投入提高堆、取料机的自动化作业程度并稳定生产运行提高码头整体智能化作业管理水平保持行业技术前沿性!对于单机全自动系统而言,全自动化的硬件控制设备都在堆取料机中,主要包括PLC、激光料堆扫描,实时大机行走定位,俯仰角测量,旋臂角度测量各类辅助装置等;料堆扫描装置完成料堆原始三维数据及预处理,通过处理后的数据形成实时的模型;根据对取料机控制策略,完成斗轮堆取料机自动作业;堆取料机异常状态检测,防止碰撞、过载等异常情况的发生;控制中心设置人工干预装置如手柄操作盘等,当堆取料机工作出现异常时,可以进行人工干预,主要包括停机,暂停堆取料、大车后退、大臂旋转等操作;单机PLC作为控制中心,需根据主控PLC传送过来的堆取料任务的范围,实现堆取料的逻辑控制及其操作的实现!

煤场GPS定位厂家客服_gps定位图相关-武汉索尔德测控技术有限公司
山东圆形料场GPS定位易于维护_gps无法定位相关-武汉索尔德测控技术有限公司
青海龙门吊GPS定位推荐-武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号