




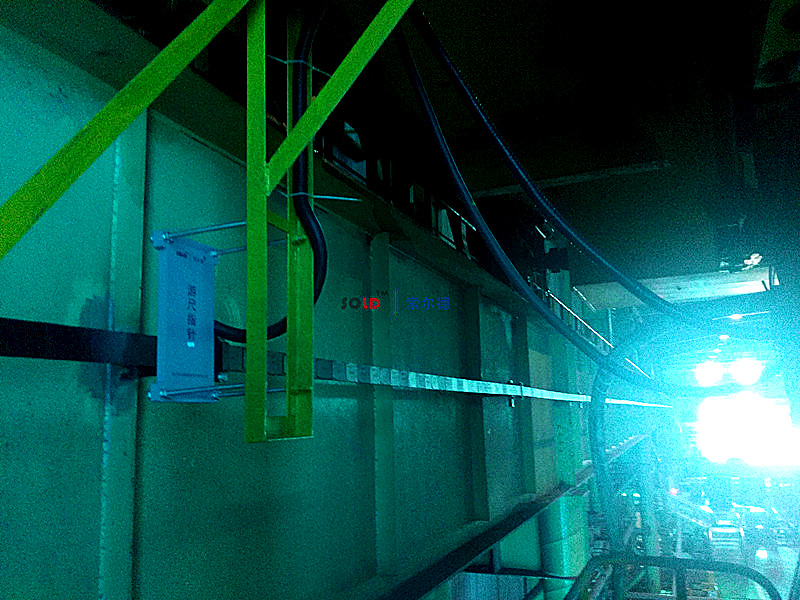
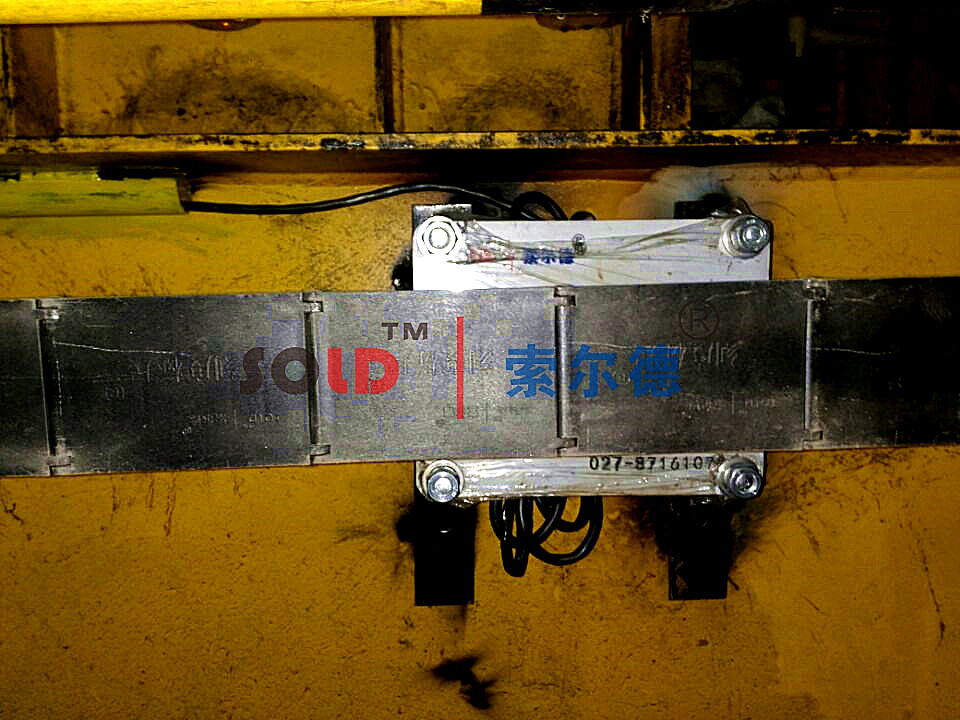
抓斗机都是以桥形主梁的金属结构作为主要承载构件横架在车间、仓库及露天料场固定跨间上方,并可沿轨道移动,取物装置悬挂在可沿桥架运行的起重小车上,使取物装置上的重物实现垂直升降和水平移动,以及完成某些特殊工艺操作的起重机,习惯上叫做“天车”或“行车”或“抓斗机”。它具有构造简单、操作方便、易于维修、起重量大和不占地面作业面积等特点,是各企业中不可缺少的起重机械设备。随着国民经济快速发展,信息化水平不断的提高,ERP、MES系统的普及,提高生产效率和安全保障越来越被重视,实现机械自动化是目前常用手段,起重机械作为现代化生产不可缺少的设备,被广泛地应用于冶金、煤炭、电力等各行业的各种物料的起重、运输、装卸安装和人员输送等作业中,从而大大减轻了体力劳动的强度,提高了劳动生产效率。实现起重机械自动化基础的问题就是位移检测,将检测到的位置信息送到可编程控制器(PLC),通过PLC控制变频调速器,进而控制走行电机的转速,则可达到自动走行、自动定位的目的。抓斗机定位普遍采用刻度标尺定位系统,刻度标尺定位系统是采用电磁感应原理来检测移动设备的位移量,当游尺指针线圈中通入交变电流时,在游尺指针附近会产生交变磁场。刻度标尺近似处在一个交变的、均匀分布的磁场中,每对刻度标尺芯线会产生感应电动势。刻度生成仪信号通过电磁耦合方式传送到刻度标尺的感应环线上。刻度分析仪对接收到的信号进行相位比较。交叉线的信号相位与平行线的信号相位相同,地址为“0”;交叉线的信号相位与平行线的信号相位相反,地址为“1”,这样感应的地址信息是格雷码排列,由此确定游尺指针在刻度标尺长度方向上的位置。
 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
 粤公网安备44030402000848号
粤公网安备44030402000848号