

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09




安徽露天设备GPS定位防碰撞系统_汽车在线gps定位相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:索尔德
- 产地:武汉
- 公司:索尔德
由于堆取料机是较大的设备,其惯性较大,在启动和停止时也是硬性的,所以在工作过程中会产生很大的撞击和震动,噪音污染严重,严重影响其安全性和有关零部件的寿命,易于损坏设备,由此设备位置控制显得尤为重要!3悬臂采用的检测技术通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高。
传统堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光测距传感器、行走限位开关、RFID方式。这几种传感器在检测位置时多数灵敏度低、寿命短、故障率高、可靠性低,操作繁锁,而且存在溜放环节(即失控区),致使半自动操作和全自动操作难以可靠稳定运行.通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高,无法有效解决同一个场垛中两台堆取料机的防碰撞以及同时作业的问题.
为提高装卸均化作业的效率和安全问题,应保证堆取料机具备寻堆认址、定位,自动确定各层料堆起点、终点及位置跟踪、终点记忆、料流对中心、电缆保护、整机自动堆取料,从而实现流畅和堆取料自动作业。同时中控室能够对作业过程进行监视。所以有必要对堆取料机大机位置进行连续跟踪、悬臂三维位置实时检测,解决堆取料作业过程中空间防碰撞的难题。2目前大机采用的定位方式目前堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光位移传感器、行走限位开关、RFID方式。

山西耐酸碱环冷小车定位系统优选供应商_高可靠性自动化成套控制系统售后服务商-武汉索尔德测控技术有限公司
安徽露天设备GPS定位防碰撞系统
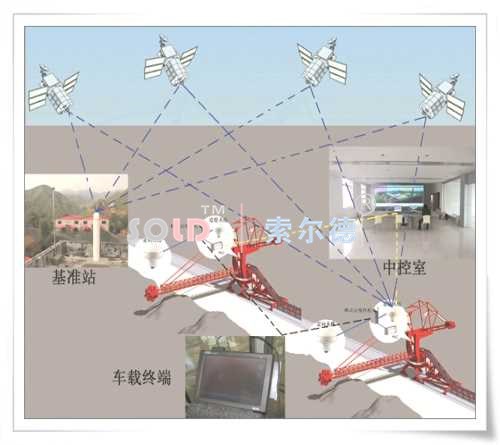
它可实现多台堆取料机同场同时作业,提高同场安全作业效率高达80%左右,且可以实现无人操作!GPS定位系统包括:参考jizhan系统、流动站子系统、地面控制室通讯系统.参考jizhan系统基准站系统给各台堆取料机提供差分数据,是整个系统的控制部分!其工作原理是基准站卫星jieshou机将自己获取的定位数据,通过光纤模式、电台、GPRS或WIFI方式将差分数据发送到堆取料机的卫星jieshou机上;卫星jieshou机通过将自身的定位数据和基准站的差分数据进行差分解算,得到厘米级定位数据!
如果您想咨询GPS定位更多信息,请致电经理:13277934095;珍惜与每个对GPS定位系统有需求的企业、个人 能有进一步的交流机会,欢迎各大企业、个人光临公司本部,武汉索尔德测控技术有限公司详细地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室。
吉林专业环冷小车定位系统厂家电话_口碑好的自动化成套控制系统-武汉索尔德测控技术有限公司

江苏索尔德环冷小车定位系统_高可靠性自动化成套控制系统哪家好-武汉索尔德测控技术有限公司
江苏烧结环冷小车定位系统优选供应商_武汉自动化成套控制系统-武汉索尔德测控技术有限公司
基准站差分系统主要包括基准站GPS卫星jieshou机和差分数据电台!基准站作为整个系统的基准必须建立在一个干扰少,基础稳定的位置,以便保证整个系统的定位精度以及全天候使用.一般来说基准站系统建立空旷的房屋楼顶上,单独建立立柱必须做好防雷措施.流动站子系统在每台堆取料机上安装两台流动站,流动站卫星jieshou机天线分别安放在大机回转中心和悬臂中部或者头部中心点处!两台流动站实时检测空间的三维坐标信息,并计算出每台堆取料机的位置、俯仰、角度信息等,并通过数据链路传输给中控室的PLC主机,这样根据“两点确定一条直线”原理,中控PLC就可以实时的知道堆取料机的大机回转中心和堆取料机的悬臂头部中心所在轴线的位置了。
武汉索尔德测控技术有限公司是一家着力于研究自动化成套控制系统的公司, 经过多年的坚持不懈与努力,公司在业内也算是有属于自己的一片天。 公司多年来一直坚持为客户提供专业、快捷、周到的服务,愿与业内同仁共同致力于行业的进步。 公司主营产品有:GPS定位系统,我们在这里等待您的到来!

自动环冷小车定位系统易于维护-武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号