

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09



福州大棚堆取料机无人化供应厂家_堆取料机无人化的报道相关-武汉索尔德测控技术有限公司
- 产品名:堆取料无人操作系统
- 产品价格:3000.00
- 尺寸:
- 产地:
- 公司:
本项目具有以下现实意义:改善劳动环境和降低劳动强度减少人为因素的影响和人力投入提高堆、取料机的自动化作业程度并稳定生产运行提高码头整体智能化作业管理水平保持行业技术前沿性.对于单机全自动系统而言,全自动化的硬件控制设备都在堆取料机中,主要包括PLC、激光料堆扫描,实时大机行走定位,俯仰角测量,旋臂角度测量各类辅助装置等;料堆扫描装置完成料堆原始三维数据及预处理,通过处理后的数据形成实时的模型;根据对取料机控制策略,完成斗轮堆取料机自动作业;堆取料机异常状态检测,防止碰撞、过载等异常情况的发生;控制中心设置人工干预装置如手柄操作盘等,当堆取料机工作出现异常时,可以进行人工干预,主要包括停机,暂停堆取料、大车后退、大臂旋转等操作;单机PLC作为控制中心,需根据主控PLC传送过来的堆取料任务的范围,实现堆取料的逻辑控制及其操作的实现!
唐山专业天车定位系统安装_天车定位系统有几种相关-武汉索尔德测控技术有限公司
福州大棚堆取料机无人化供应厂家
系统特点1)安装简单,一劳永逸:整个系统可一次性安装调试完毕;2)速度快:对于一个大型散货堆/煤场(100米),可在15分钟内(测量系统行进速度为10米/分钟)完成所有的测量和计算工作;3)自动化程度高:采集的数据均由计算机自动处理,测量结果显示在电脑屏幕上;4)精度高:激光扫描所获取的数据量大,数据点密度高,完全可以反映目标表面特征;解决了常规测量方法所不能解决的表面近似误差;系统相对误差0.3%!
GNSS三维坐标位置检测系统可提供堆取料机走行定位系统输出的走行值;根据当前时刻激光扫描数据与堆取料机走行定位系统的位置信息产生对应关系,将当前时刻料堆表面被测点的一组数据从激光扫描装置坐标系下转换成料场坐标系下;在料场坐标系下,料堆表面一个被测点坐标值中的x、y值为被测点在料场平面的两维坐标位置,被测点Z值为对应此x、y值时被测点的高度值。网格规范化处理过程是,对激光扫描装置采集的所有测量点坐标值进行均匀网格化处理,即在料场平面坐标下,在料场长度和宽度范围内沿轨道方向即Y轴、和沿垂直轨道方向即X轴,每间隔一定距离对整个料场进行等分,这样在料场的有效堆放范围内形成一个个大小面积相等均匀分布的网格,实现料场的数字化分割;对测量点落在网格中的点数量进行规范化整合处理,保证每个网格只对应一个坐标值;如果落在同一网格内有多个测量点数据,则对这些测量点的高度Z求平均值作为网格点的Z值,且规定网格点的x、y坐标为每个网格中心,最后以新坐标点作为落在此网格内的测量点坐标;规范化处理后的网格在数学上可以表示为一个矩阵,在计算机实现中则是一个二维数组;每个网格单元或数组的一个元素,对应一个高度值.
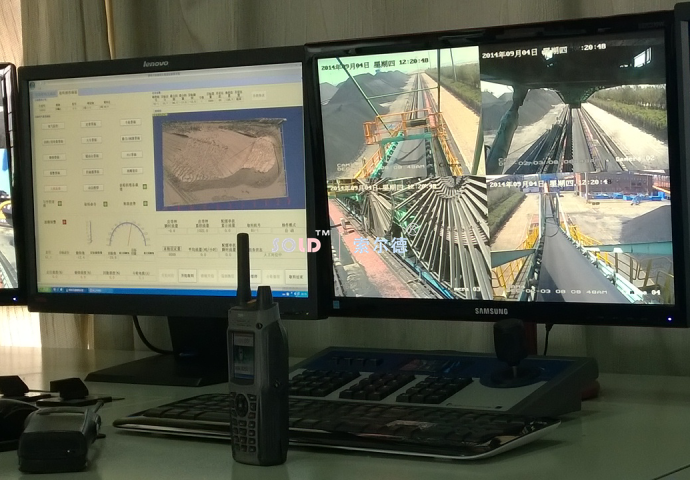
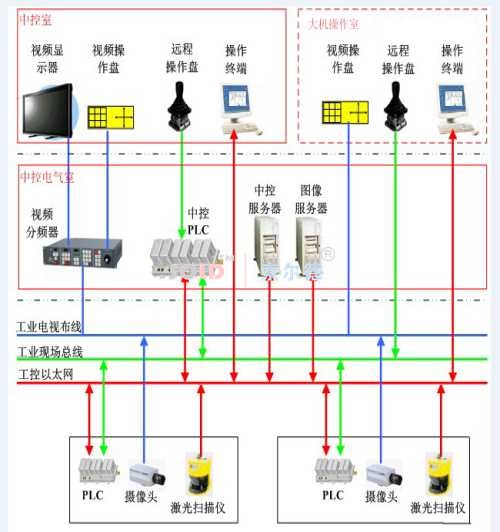
控制机从管理机获得作业计划或者自行编制作业计划,根据作业料堆在料场中的三维空间形状数据,结合堆取料机的物理尺寸数据,通过优化计算获得堆取料机的取料或堆料位置,形成作业指令,将作业指令发送到相应的堆取料机PLC,中控操作人员确认作业任务(作业料堆、作业料种、作业吨位等)正确和环境安全因素后,由堆取料机进行无人驾驶的堆、取料作业.在堆取料过程中,中控操作人员可以通过监控终端和视频终端实时监视现场作业过程,必要时可以通过位于控制室的操作台对堆、取料作业进行手动干预和作业调整!
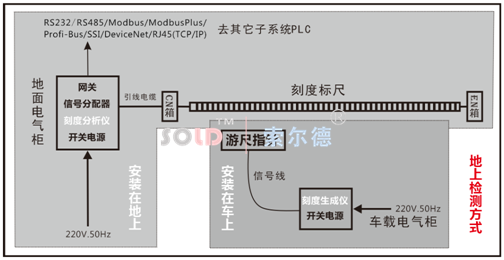
并实时更新数据库内数据内容,同时数据库数据内容的变化触发三维成像控件从数据库读取一次数据,从而实现终端显示的三维料场图像实时动态更新!具体的说:数据预处理的过程是,堆取料机实时运动状态数据是通过堆取料机的走行、俯仰、回旋刻度标尺输出的走行值、俯仰角度、回旋角度获得,堆取料机悬臂的动作反应在俯仰角度、回旋角度的变化上;激光扫描装置采集的数据是发射光心在0到180度范围内,周期性的以每0!5度或0.25度发射角度间隔发射光束,通过测量发射光束与料堆表面反射光束的时间差得出激光扫描装置发射光心到料堆反射表面空间距离;激光扫描装置安装相对位置数据是激光扫描装置到俯仰轴的距离,俯仰角度在零度时激光扫描装置相对于地面的高度;堆取料机实时运动状态数据与激光扫描装置采集的数据在时间上实现同步匹配!
我司主营自动化成套控制系统领域的企业,主要以堆取料机无人化为主要产品,公司位于武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,更多产品信息详情请上http://www.whsold.com查看。武汉索尔德测控技术有限公司愿与社会各界朋友共同合作、共创双赢、共创精彩明天!
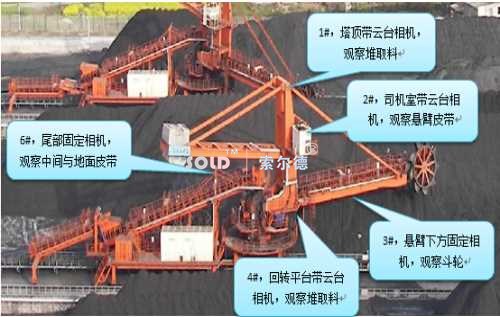
实现料堆实时动态跟踪的三维成像方法,是利用堆取料机的走行、俯仰、回旋运动,带动安装在堆取料机悬臂前方的激光扫描装置对料堆进行动态扫描,对获得的激光扫描数据进行预处理、坐标转化、网格规范化处理、插值处理后生成规则的三维数据,生成整个料场的完整网格数据库;由三维成像控件从数据库中读出料场网格坐标信息,以料场为图像显示区域、料场地面为显示基面,实现区域内的坐标还原,完成料堆三维图像显示;高密度数据的快速采集在操作过程中,每秒可获得料堆10次以上轮廓;高速度的数据处理与分析,数据处理由计算机快速自动完成;简易的三维图形操作系统实现被测目标的立体重现,并能够进行图形的旋转、平移和局部放大等交互操作,测量结果一目了然。

福建智能堆取料机定位系统_索尔德自动化成套控制系统价格-武汉索尔德测控技术有限公司

辽宁无人化堆取料机定位系统推荐_原装自动化成套控制系统-武汉索尔德测控技术有限公司
堆取料机走行、俯仰、回旋刻度标尺的数据刷新与激光扫描装置的数据刷新两者的数据匹配原则是以激光扫描数据的时间为准,用接近该时间的刻度标尺数据去匹配激光扫描数据,这样每个时刻激光扫描数据都与刻度标尺的信息建立了对应关系.数据坐标化处理过程是,首先以激光扫描装置为原点建立坐标系,某一时刻来自激光扫描装置的距离值和对应的发射角度值放入此坐标系下;随后对应料场建立料场坐标系,沿堆取料机走行轨道方向作为Y轴,平行料场地面并垂直轨道方向为X轴,垂直料场地面方向为Z轴;料场坐标系的原点与堆取料机走行值的原点重合,以堆取料机俯仰轴中心作为相对基点;安装于堆取料机悬臂上的激光扫描装置在当前时刻在料场坐标系下的空间坐标光扫描装置到相对基点的空间距当前时刻俯仰刻度标尺输出的俯仰角度值,回转刻度标尺输出的回转角度值,激光扫描装置在俯仰角度为0度时相对于地面的高度。 在汽车电子领域,德国Electronics Production Partners公司将展示其产品STRATUS AOI ,该产品用于高功率LED模块中金质导体(一般以陶瓷为载体)缺陷检测的自动光学检测系统。丹麦DSE A/S公司将带来其功能测试设备。Glen Brook的Jewel Box Series Jewel Box X 光检测系统可提供具有很高分辨率以及亮度准确性的图像。此次展会意大利Seica将展示Aerial 立式飞针测试仪,用来测试试制板或样品板、以及中小批量板。桑博特国际集团有限公司展示的GPS是基于 Intel XSCALE Processor和Microsoft Windows CE.NET4.6 操作系统的PDA型手持式语音导航系统。
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号