

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09




江苏智能堆取料机无人化制造厂家_堆取料机无人化的报道相关-武汉索尔德测控技术有限公司
- 产品名:堆取料无人操作系统
- 产品价格:3000.00
- 尺寸:
- 产地:
- 公司:
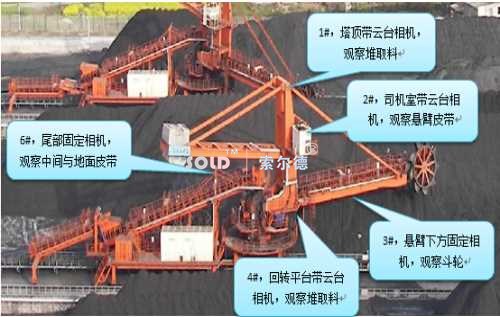
利用堆取料机的走行、俯仰、回旋运动,带动安装在堆取料机悬臂前方的激光扫描装置对料堆进行动态扫描,对获得的激光扫描数据进行预处理、坐标转化、网格规范化处理、插值处理后生成规则的三维数据,最终生成整个料场的完整网格数据库,并实时更新数据库内数据内容,从而实现终端显示的三维料场图像实时动态更新.生成的实时三维料堆图像数据,不仅能让作业人员动态掌握料场料堆的堆放情况,更为重要的是通过对料堆形状的实时识别,并实时动态对料堆进行数据化处理保存,为下一步全自动堆取料工艺提供了有力的支撑和保证.
武汉索尔德测控技术有限公司是一家着力于研究自动化成套控制系统的公司, 经过多年的坚持不懈与努力,公司在业内也算是有属于自己的一片天。 公司多年来一直坚持为客户提供专业、快捷、周到的服务,愿与业内同仁共同致力于行业的进步。 公司主营产品有:堆取料无人操作系统,我们在这里等待您的到来!
江苏智能堆取料机无人化制造厂家
系统特点1)安装简单,一劳永逸:整个系统可一次性安装调试完毕;2)速度快:对于一个大型散货堆/煤场(100米),可在15分钟内(测量系统行进速度为10米/分钟)完成所有的测量和计算工作;3)自动化程度高:采集的数据均由计算机自动处理,测量结果显示在电脑屏幕上;4)精度高:激光扫描所获取的数据量大,数据点密度高,完全可以反映目标表面特征;解决了常规测量方法所不能解决的表面近似误差;系统相对误差0.3%!
目前,我国的散货(矿石、煤等)料场主要采取斗轮式取料机进行取料作业,尤其是在大型散货码头,原料的大量需求造就了巨型的堆场,这就要求有一定数量的取料设备来进行生产,同时需配备相应数量的操作司机来驾驶这些设备.因此,如何提高取料效率、改善作业环境、降低劳动强度,降低人工成本、减少人工干预造成的效率降低就成了所有大型散货码头面临的共同课题!散货取料装船流程的效率高低,是直接制约港口装船疏港效率的主要环节,智能化取料研究与应用,就是针对取料机现有的作业模式和取料工艺进行研究,通过对取料机PLC程序及上位机软件进行合理优化和二次开发,并借助前沿的设备和技术手段以实现取料机机智能化提高的同时,提高作业效率,并兼顾人力成本的节省!
内蒙古无人化堆取料机定位系统易于维护_索尔德自动化成套控制系统厂家客服-武汉索尔德测控技术有限公司
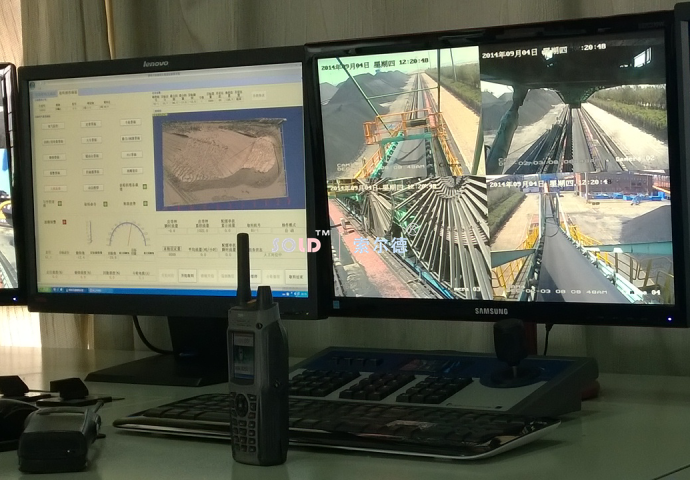
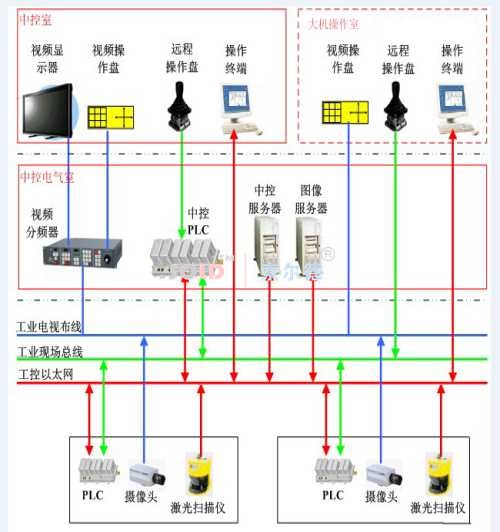
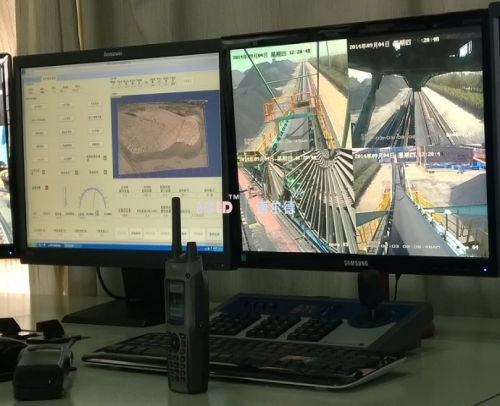
人机操作界面软件!直观可视的操作界面,包含了针对作业大机的各项参数显示栏以及可控制和修改实际作业流程的具体按键.操作员可以通过画面上的实时数据显示和操作按键,在中控室里进行远程监测和控制现场的堆料作业,也是实现自动化取料的人机交互系统.防碰撞模型软件!用于在中控室3D实时显现单机的工作状态信息,包括单机的在堆场的位置信息,悬臂的方位信息,悬臂的俯仰角度信息;其中单机之间有碰撞危险时发出警报;还可以设定保护值,当单机之间距离接近保护值,给主控PLC发出停机信号;本系统中斗轮堆取料机单机全自动化系统工作过程如下:首先是工作人员下达任务单,控制中心的工业控制机(IPC)的中控处理单元对任务单进行处理,分析出是堆料或取料工作,并计算出的堆、取料的坐标范围;IPC将堆取料的工作方式及其范围坐标等数据传输至主控PLC中,PLC根据是堆料或取料工作采取不同的控制策略.
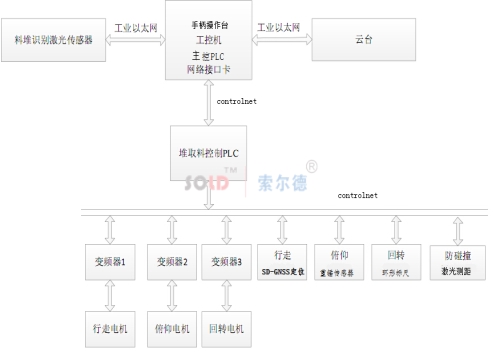
本项目具有以下现实意义:改善劳动环境和降低劳动强度减少人为因素的影响和人力投入提高堆、取料机的自动化作业程度并稳定生产运行提高码头整体智能化作业管理水平保持行业技术前沿性。对于单机全自动系统而言,全自动化的硬件控制设备都在堆取料机中,主要包括PLC、激光料堆扫描,实时大机行走定位,俯仰角测量,旋臂角度测量各类辅助装置等;料堆扫描装置完成料堆原始三维数据及预处理,通过处理后的数据形成实时的模型;根据对取料机控制策略,完成斗轮堆取料机自动作业;堆取料机异常状态检测,防止碰撞、过载等异常情况的发生;控制中心设置人工干预装置如手柄操作盘等,当堆取料机工作出现异常时,可以进行人工干预,主要包括停机,暂停堆取料、大车后退、大臂旋转等操作;单机PLC作为控制中心,需根据主控PLC传送过来的堆取料任务的范围,实现堆取料的逻辑控制及其操作的实现!
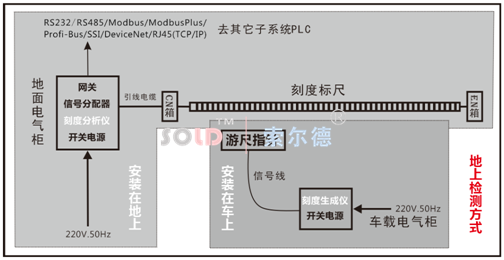
GNSS三维坐标位置检测系统可提供堆取料机走行定位系统输出的走行值;根据当前时刻激光扫描数据与堆取料机走行定位系统的位置信息产生对应关系,将当前时刻料堆表面被测点的一组数据从激光扫描装置坐标系下转换成料场坐标系下;在料场坐标系下,料堆表面一个被测点坐标值中的x、y值为被测点在料场平面的两维坐标位置,被测点Z值为对应此x、y值时被测点的高度值。网格规范化处理过程是,对激光扫描装置采集的所有测量点坐标值进行均匀网格化处理,即在料场平面坐标下,在料场长度和宽度范围内沿轨道方向即Y轴、和沿垂直轨道方向即X轴,每间隔一定距离对整个料场进行等分,这样在料场的有效堆放范围内形成一个个大小面积相等均匀分布的网格,实现料场的数字化分割;对测量点落在网格中的点数量进行规范化整合处理,保证每个网格只对应一个坐标值;如果落在同一网格内有多个测量点数据,则对这些测量点的高度Z求平均值作为网格点的Z值,且规定网格点的x、y坐标为每个网格中心,最后以新坐标点作为落在此网格内的测量点坐标;规范化处理后的网格在数学上可以表示为一个矩阵,在计算机实现中则是一个二维数组;每个网格单元或数组的一个元素,对应一个高度值!
黑龙江斗轮堆取料机无人化操控系统_2.8堆取料机自动无人化相关-武汉索尔德测控技术有限公司
内蒙古智能堆取料机定位系统推荐_索尔德自动化成套控制系统安装-武汉索尔德测控技术有限公司
三维数据接口模块!负责三维数据计算模块与计算机主控程序间的通信!计算机主控模块!负责自动堆取料全过程中的控制,包括根据作业任务生产控制指令,堆取料过程中的控制与修正,取料切入点的计算,大车寸动,取料效率的提高等!主控PLC数据通信模块!负责PLC控制系统的定时,事件触发,请求等数据通信!激光扫描仪控制模块!负责驱动激光扫描仪的转动,远程配置等.堆取料机的PLC控制模块!负责接收作业任务,并根据作业任务自动完成堆取料作业,包括堆取料机的自动对位,堆取料过程中的大车寸动,取料过程中的切入点的控制,恒流量控制,软、硬件防碰撞控制,人工远程干预的实现等。
湖北堆取料机定位系统_智能自动化成套控制系统-武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司索尔德测控技术,我们巍峨耸立于武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,我们在这里等待您的到来。 也可以通过电话联系: 联系方式:13277934095 联系人:经理 致电我们,有意向不到的惊喜!
鄂州智能堆取料机定位系统供应商-武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号