

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09





云南堆取料机GPS定位北斗控制系统_汽车安装gps定位相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
现有的防碰撞方法是根据两台堆取料机是否处于同一个场垛进行判断,如果两台堆取料机不在同一个场垛就可以正常作业!两台堆取料机进入一个场垛进行作业时,就对两台堆取料机同时进行锁定,使其不能工作,由此避免堆取料机之间发生碰撞,这严重影响了堆取料机的同场作业!由于以上原因,当前都采用人工监控的方法来避免空间碰撞事故。现有的防碰撞方法无法有效避免堆取料机空间防碰撞问题,使得两台堆取料机无法同时在同一个堆场中安全作业,严重影响效率.

防城港高效率自动巡仓系统官网_高效率自动巡仓系统厂家客服-武汉索尔德测控技术有限公司
云南堆取料机GPS定位北斗控制系统
我公司是专业从事物料搬运设备定位和控制的民营高科技企业,为用户提供专业技术咨询、技术资料、方案设计、包装运输、设备点交、安装指导、技术培训、回访服务等!为了解决客户后顾之忧,本公司特推行“四制四服务”的售后服务制度:四项制度1)30分钟内回复制:接到客户电话起30分钟内做出回应!2)24小时到场制:需要现场解决问题的我公司售后技术工程师在24小时内到达现场!3)终身服务制:对我公司产品实行终身售后服务.
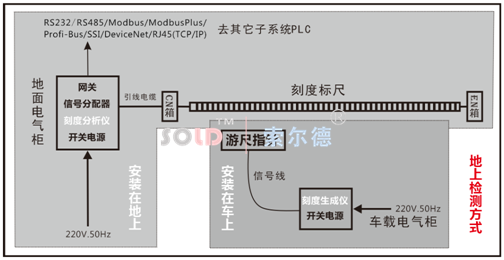
为提高装卸均化作业的效率和安全问题,应保证堆取料机具备寻堆认址、定位,自动确定各层料堆起点、终点及位置跟踪、终点记忆、料流对中心、电缆保护、整机自动堆取料,从而实现流畅和堆取料自动作业!同时中控室能够对作业过程进行监视!所以有必要对堆取料机大机位置进行连续跟踪、悬臂三维位置实时检测,解决堆取料作业过程中空间防碰撞的难题!2目前大机采用的定位方式目前堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光位移传感器、行走限位开关、RFID方式.
如果您看到这段话,说明您对我们GPS定位系统感兴趣,不要犹豫,给我们一个机会,也给自己一个机会。 拿起手机来拨打我们的电话。经理等待着您的每一次致电:13277934095 让武汉索尔德测控技术有限公司为您服务, 我们在武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室这里等您。
由于堆取料机是较大的设备,其惯性较大,在启动和停止时也是硬性的,所以在工作过程中会产生很大的撞击和震动,噪音污染严重,严重影响其安全性和有关零部件的寿命,易于损坏设备,由此设备位置控制显得尤为重要!3悬臂采用的检测技术通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高!
并对相邻的堆取料机进行两两比较,计算出他们之间的安全距离,臂架俯仰和旋转的角度。一旦相邻的堆取料机之间的距离小于安全距离或旋转、俯仰角度超出安全角度时,软件将自动向操作人员发出报警信息以及停机信号,防止意外事故的发生!通过RTK方式来检测悬臂位置信息可以到厘米级,并且不受自身行车轮打滑和其它编码器累积误差的影响,比现有的防碰撞方法更加准确。克服了现有技术中由于悬臂空间位置反馈都是采用行走、旋转、俯仰三个编码器的数值计算,而造成的误差累积问题.
昆明正宗抓斗机定位系统_防尘耐酸碱位移传感器-武汉索尔德测控技术有限公司
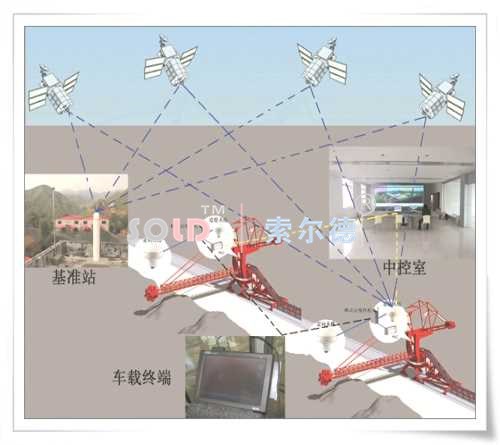
它可实现多台堆取料机同场同时作业,提高同场安全作业效率高达80%左右,且可以实现无人操作!GPS定位系统包括:参考jizhan系统、流动站子系统、地面控制室通讯系统。参考jizhan系统基准站系统给各台堆取料机提供差分数据,是整个系统的控制部分。其工作原理是基准站卫星jieshou机将自己获取的定位数据,通过光纤模式、电台、GPRS或WIFI方式将差分数据发送到堆取料机的卫星jieshou机上;卫星jieshou机通过将自身的定位数据和基准站的差分数据进行差分解算,得到厘米级定位数据!
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号