

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09





北京卸料车APON无线定位测距仪生产厂家_正宗位移传感器-武汉索尔德测控技术有限公司
- 产品名:APON无线定位测距仪
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
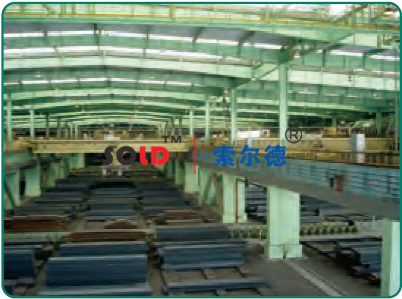
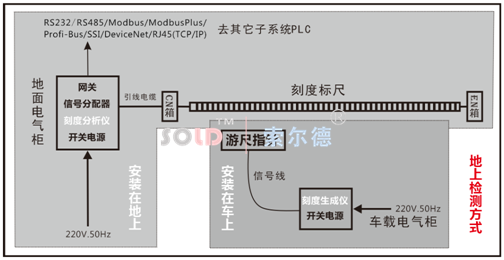
为用户提供技术咨询、技术资料、方案设计、包装运输、设备点交、安装指导、技术培训、回访服务等,长年优惠供应备品、备件,竭诚满足用户对技术服务的要求。真正将客户未知的,已知的,担心的问题解决于无形!APON无线定位测距仪可用于卸料小车定位和远程控制、天车定位和远程控制、堆取料机定位和远程操控等等!本项目主要解决卸料车的实时位置检测,可以采用SOLD-APON无线定位测距仪,将卸料车的实时位置集中送到系统PLC,可实现卸料车的位置实时检测,在上位机控制其运行.
昆明库区抓斗机定位系统生产厂家_位移传感器-武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司索尔德测控技术,我们巍峨耸立于武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,我们在这里等待您的到来。 也可以通过电话联系: 联系方式:13277934095 联系人:经理 致电我们,有意向不到的惊喜!
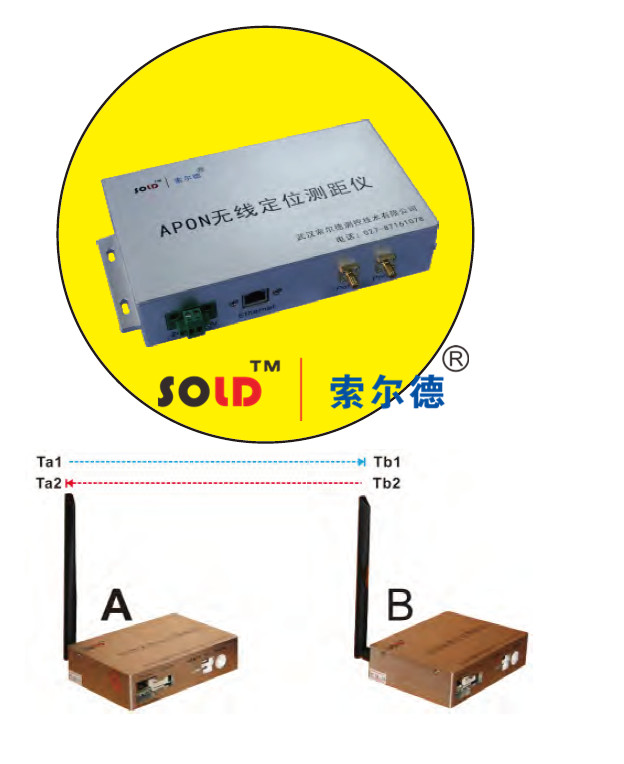
测距定位的计算是以各自天线为基点,不得随意移动天线。1)jizhan子系统B:由jizhan天线、jizhan电气柜(内含jizhan主机、开关电源、智能网关、智能控制器等).2)移动子系统A:由移动天线、移动电气柜组成(内含移动接收机、开关电源、不间断电源等)!3APON无线定位测距仪系统原理APON测速测距功能基应答式电波测距原理,固定不动的基准站A模块和移动的B模块之间发射脉冲数据,根据协议测距误差进行分析和建模,然后建立测距的有偏误差与两飞行体相对坐标间的约束关系,利用拉格朗日乘子法和泰勒级数法获取飞行体间相对坐标值。
计算公式如下:S=C*【(Ta2-Ta1)-(Tb2-Tb1)】/2其中C为光速,S为要计算的距离,TaTaTbTb2为时间戳!在测速方面,系统根据测距所得数据,由卡尔曼Kalman滤波的回归方程计算出模块之间的径向速度.APON无线定位测距仪是非接触位置检测,无磨损和滑差,所需通讯电缆极少,一次安装长久使用。武汉索尔德测控技术有限公司地处九省通衢的湖北省会城市武汉,是一家以移动搬运设备位置检测为主导,以自动无人控制为延伸的专业企业,拥有GNSS露天移动设备实时姿态测量系统、刻度标尺定位系统、格雷码母线定位系统、APON无线定位测距仪、磁感直线位移系统、RFID射频位置识别系统、激光位移检测系统、UWB超宽带室内定位系统、环形标尺角度检测系统、磁栅条码定位系统、磁钉点阵式定位系统等多种位移检测产品,已将产品成功应用于筒仓卸料小车远程智能控制系统、库房天车物流信息管理系统及智能车间管理系统、堆取料机动作综合检测及料场智能化管理系统、煤码头自动化翻堆及取料集控系统、叶轮给煤机走行位置检测控制系统、焦化机车定位联锁控制管理系统、轨道吊场桥岸桥实时位置检测系统、装卸船机定位控制系统、环形运动机械定位控制系统等。
北京卸料车APON无线定位测距仪生产厂家
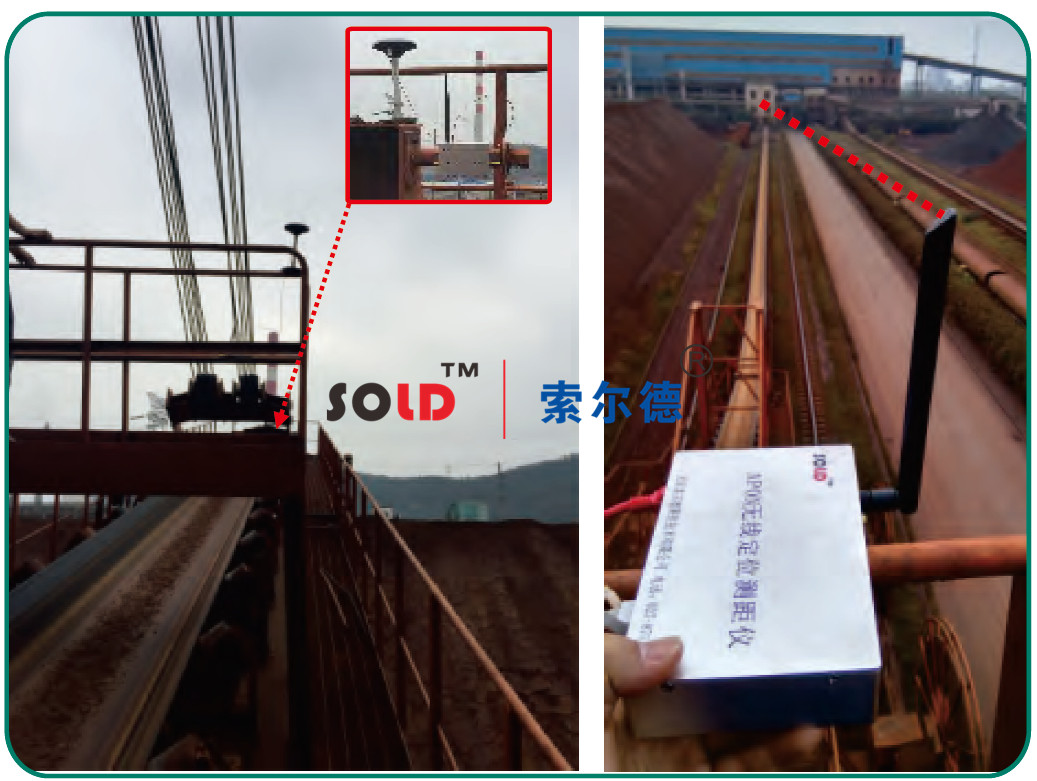
APON无线定位测距仪由定位硬件层、数据处理层组成.定位硬件层是APON实现定位功能的主体部分,包括jizhan天线和移动天线(两模块可互换);数据处理层则是实现位置计算和速度计算的关键。根据项目实际需要,jizhan天线是定位系统的基准锚点,其位置和安装角度固定,为系统确定了空间坐标基准;移动天线是移动的,可实时获取周围jizhan天线的位置,由控制解算模块计算设备本身的位置和速度!2APON无线定位测距仪设备构成APON无线定位测距仪由基本的jizhan子系统和移动子系统构成,可以在jizhan端或者移动端得到距离值,应急情况下可以将jizhan主机和移动接收机互换,只需要软件设置即可!
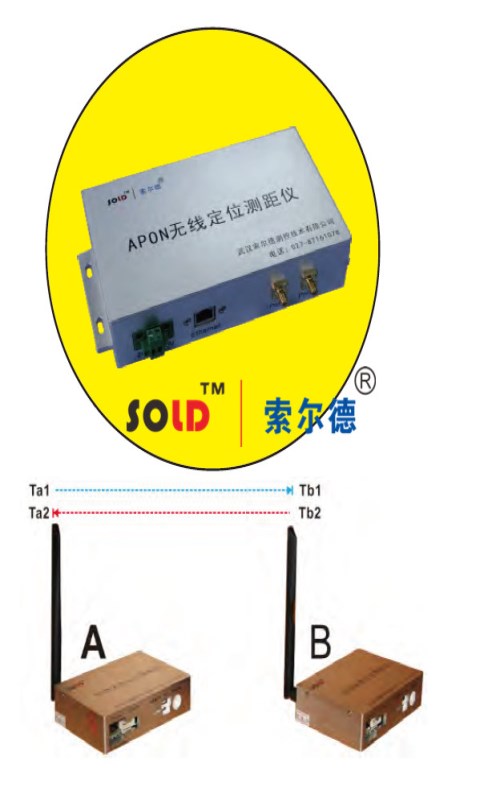
APON无线定位测距仪(以下简称APON)是一种高准确度测速测距、实时定位系统,模块采用应答式电波测距原理,通过在两套模块之间发送和接收信号实现计算,用于对设备移动过程中进行实时定位和速度检测!APON无线定位测距仪由定位硬件层、数据处理层组成.定位硬件层是APON实现定位功能的主体部分,包括jizhan天线和移动天线(两模块可互换);数据处理层则是实现位置计算和速度计算的关键。根据项目实际需要,jizhan天线是定位系统的基准锚点,其位置和安装角度固定,为系统确定了空间坐标基准;移动天线是移动的,可实时获取周围jizhan天线的位置,由控制解算模块计算设备本身的位置和速度!
双向飞行时间算法概述如下:每个模块从启动开始即会生成一条独立的时间戳。模块A的发射机在其时间戳上的Ta1发射请求性质的脉冲信号,模块B接收机在其时间戳上的Tb1接收到该信号.对信号加以一定的处理手段后,模块B在Tb2时刻发射一个响应性质的信号,被模块A在自己的时间戳Ta2时刻接收!由此可以计算出脉冲信号在两个模块之间的飞行时间,从而确定飞行距离!计算公式如下:S=c×[(Ta2-Ta1)-(Tb2-Tb1)]/2其中c为光速,S为要计算的距离,TaTaTbTb2为时间戳!

陕西智能行车抓斗机定位系统_其它电气控制系统相关-武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09

 粤公网安备44030402000848号
粤公网安备44030402000848号