

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


合肥智能天车APON无线定位测距仪推荐_测距仪相关-武汉索尔德测控技术有限公司
- 产品名:APON无线定位测距仪
- 产品价格:面议
- 尺寸:
- 产地:武汉
- 公司:索尔德
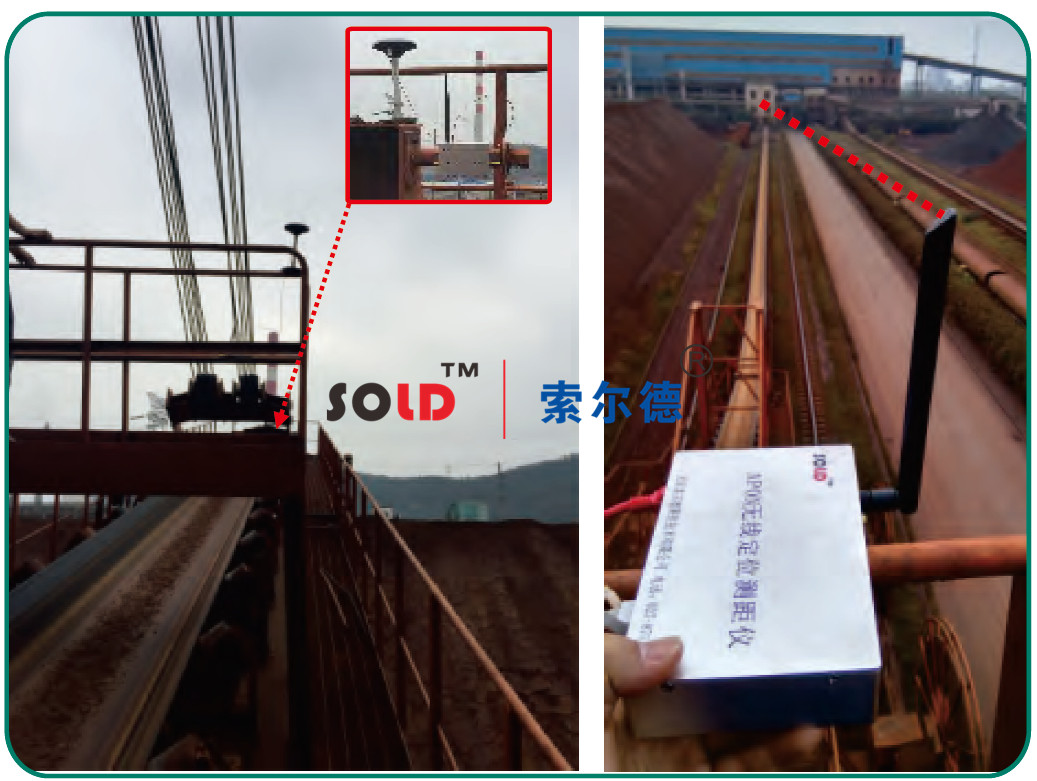
APON无线定位测距仪由定位硬件层、数据处理层组成!定位硬件层是APON实现定位功能的主体部分,包括jizhan天线和移动天线(两模块可互换);数据处理层则是实现位置计算和速度计算的关键.根据项目实际需要,jizhan天线是定位系统的基准锚点,其位置和安装角度固定,为系统确定了空间坐标基准;移动天线是移动的,可实时获取周围jizhan天线的位置,由控制解算模块计算设备本身的位置和速度.2APON无线定位测距仪设备构成APON无线定位测距仪由基本的jizhan子系统和移动子系统构成,可以在jizhan端或者移动端得到距离值,应急情况下可以将jizhan主机和移动接收机互换,只需要软件设置即可!
武汉索尔德测控技术有限公司,具体产品品牌可上我司网站上查询!质量保证 价格取胜 信誉地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室 我们将尽全力为您提供优惠的价格及快捷细致的服务,希望能对您的工作有所帮助!更多产品详情请联系:经理 13277934095。

江西烧结卸料小车自动布料系统_自动定量布料系统相关-武汉索尔德测控技术有限公司
合肥智能天车APON无线定位测距仪推荐

江苏高炉矿槽卸料小车自动布料系统专业客服_隧道二衬台车自动布料系统施工工法相关-武汉索尔德测控技术有限公司

济源索尔德自动布料系统_位移传感器-武汉索尔德测控技术有限公司
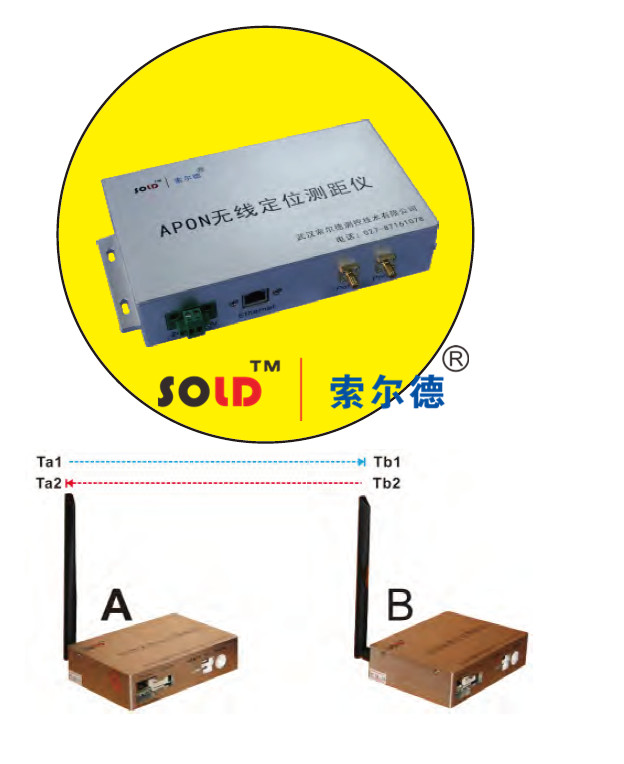
APON无线定位测距仪技术原理APON测速测距功能基于模块采用应答式电波测距原理,算法概述如下:每个模块从启动开始即会生成一条独立的时间戳.模块A的发射机在其时间戳上的Ta1发射请求性质的信号,模块B接收机在其时间戳上的Tb1接收到该信号.对信号加以一定的处理手段后,模块B在Tb2时刻发射一个响应性质的信号,被模块A在自己的时间戳Ta2时刻接收.由此可以计算出信号在两个模块之间的应答时间,从而确定距离!

安阳轨道小车自动布料系统厂家_布料自动仓储系统相关-武汉索尔德测控技术有限公司
计算公式如下:S=C*【(Ta2-Ta1)-(Tb2-Tb1)】/2其中C为光速,S为要计算的距离,TaTaTbTb2为时间戳!在测速方面,系统根据测距所得数据,由卡尔曼Kalman滤波的回归方程计算出模块之间的径向速度.APON无线定位测距仪是非接触位置检测,无磨损和滑差,所需通讯电缆极少,一次安装长久使用.武汉索尔德测控技术有限公司地处九省通衢的湖北省会城市武汉,是一家以移动搬运设备位置检测为主导,以自动无人控制为延伸的专业企业,拥有GNSS露天移动设备实时姿态测量系统、刻度标尺定位系统、格雷码母线定位系统、APON无线定位测距仪、磁感直线位移系统、RFID射频位置识别系统、激光位移检测系统、UWB超宽带室内定位系统、环形标尺角度检测系统、磁栅条码定位系统、磁钉点阵式定位系统等多种位移检测产品,已将产品成功应用于筒仓卸料小车远程智能控制系统、库房天车物流信息管理系统及智能车间管理系统、堆取料机动作综合检测及料场智能化管理系统、煤码头自动化翻堆及取料集控系统、叶轮给煤机走行位置检测控制系统、焦化机车定位联锁控制管理系统、轨道吊场桥岸桥实时位置检测系统、装卸船机定位控制系统、环形运动机械定位控制系统等!
我们做精做专,优化服务,客户的评价我们视为生命来对待!期待在关键的时候为您提供现场解决方案以及完善的产品和服务.索尔德公司是专业从事物料搬运设备定位和控制的民营高新技术企业,我们本着“诚实守信,专业专注,合作多赢,成人达己”的企业核心价值观,“立足chuangxin,实现gaoxiao、拼搏、互动、温暖的科技企业”的经营宗旨,建立完善的售后服务机制,给客户提供及时的一体化服务!实施产品售前、售中、售后技术服务!
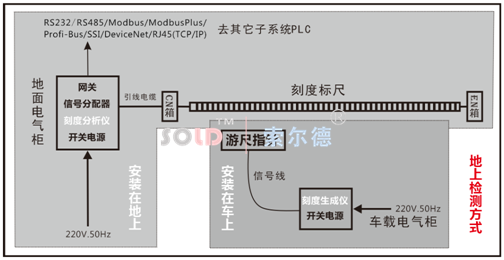
测距定位的计算是以各自天线为基点,不得随意移动天线!1)jizhan子系统B:由jizhan天线、jizhan电气柜(内含jizhan主机、开关电源、智能网关、智能控制器等)!2)移动子系统A:由移动天线、移动电气柜组成(内含移动接收机、开关电源、不间断电源等).3APON无线定位测距仪系统原理APON测速测距功能基应答式电波测距原理,固定不动的基准站A模块和移动的B模块之间发射脉冲数据,根据协议测距误差进行分析和建模,然后建立测距的有偏误差与两飞行体相对坐标间的约束关系,利用拉格朗日乘子法和泰勒级数法获取飞行体间相对坐标值.
双向飞行时间算法概述如下:每个模块从启动开始即会生成一条独立的时间戳!模块A的发射机在其时间戳上的Ta1发射请求性质的脉冲信号,模块B接收机在其时间戳上的Tb1接收到该信号。对信号加以一定的处理手段后,模块B在Tb2时刻发射一个响应性质的信号,被模块A在自己的时间戳Ta2时刻接收!由此可以计算出脉冲信号在两个模块之间的飞行时间,从而确定飞行距离.计算公式如下:S=c×[(Ta2-Ta1)-(Tb2-Tb1)]/2其中c为光速,S为要计算的距离,TaTaTbTb2为时间戳!
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号