

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09




四川编码电缆皮带伸缩头定位系统制造商_格雷码母线位移传感器-武汉索尔德测控技术有限公司
- 产品名:皮带机伸缩头定位控制系统
- 产品价格:面议
- 尺寸:
- 产地:武汉
- 公司:索尔德
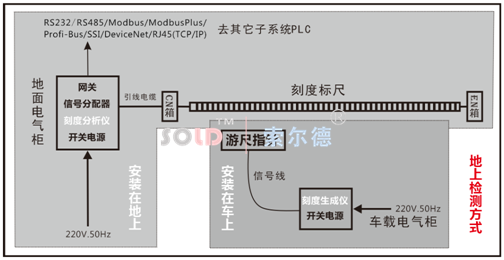
皮带伸缩头定位通常采用的定位技术是刻度标尺定位系统!刻度标尺定位系统采用法拉第电磁感应定律(磁力线传导原理)来检测移动搬运设备的位移量,当游尺指针线圈中通入交变电流时,在游尺指针附近会产生交变磁场.刻度标尺近似处在一个交变的、均匀分布的磁场中,每对刻度标尺芯线会产生感应电动势!刻度生成仪信号通过电磁耦合方式传送到刻度标尺的感应环线上!刻度分析仪对接收到的信号进行相位比较!交叉线的信号相位与平行线的信号相位相同,地址为“0”;交叉线的信号相位与平行线的信号相位相反,地址为“1”,这样感应的地址信息是数字编码排列,由此确定游尺指针在刻度标尺长度方向上的位置,对应就是移动搬运设备走行位置!
刻度标尺采用的是无磨损的非接触式位置检测,耐污染能力超强,可用在水下、防蒸汽、耐酸碱,使用寿命长,多种信号输出方式选择,具有反向极性保护功能、防雷击、防射频干扰、防静电.可以断续或连续检测,测距长达2公里,位移检测长度可以根据需要定制,它安装简单更换方便(无需改变现场环境),不需要维护,无需参考点的位移量输出,位置的取样时间和测量长度没有关系,可以用在环形运动机械位置检测!刻度标尺可以埋在水泥地面内,方便安装和防护,不影响作业环境!
刻度标尺定位系统定位精度5毫米,分辨率2毫米,可以断续或连续检测,尤其适用于轨道不平整的大车或环形运动机械位移检测.它具有防水、防油、防尘、耐酸碱,使用寿命长等特点,适用于冶金、矿山、水利、港口码头堆场、仓储、化工等条件比较恶劣的环境。经过市场长期的实践证明,刻度标尺定位系统可用于散状物料处理环境中的物料搬运设备!如矿山系统、冶金系统、港口码头系统、化工系统、造船系统、电力系统、水泥系统、铁路系统、轻工系统、建材系统、石油系统、机械系统等有轨搬运设备定位和自动控制,包括:环形炉点加热、环冷小车定位(硅钢厂、烧结厂);卸料小车定位(矿山、烧结、球团、原料、焦化、炼铁、港口、石灰窑);天车定位(冷轧、热轧、剪切库、板坯库、钢卷库、成品库、原料库、垃圾发电厂、矿热炉车间料罐倒运、垃圾发电厂);推拨车机迁车台定位(翻车机);船舶下水定位(造船厂梳式滑道绞车同步控制);斗轮堆取料机防碰撞定位(原料厂、港口码头);门机定位,装卸船机定位(港口码头、水电站);高铁500米长钢轨运转系统;其它移动有轨设备的定位和集中控制!
皮带机伸缩头定位控制系统物料在胶带机之间的交叉转运,通常是采用三通挡板和落煤溜槽进行切换,由于受到落煤溜槽角度的限制,因而建筑结构空间较高,落差大,粉尘诱导风量增加以及冲击较大,损坏胶带及缓冲托辊等,给工艺布置及运行上也带一些问题,特别对于三位置的交叉,不仅增加转运站的层数和层高,而且增加了胶带机的布置长度!近年来,在翻车机或卸煤装置地下转运站以及贮煤场转运站,分别采用了二位置和三位置的皮带机头部伸缩装置(简称皮带机伸缩头)进行胶带机之间的交叉,大限度的压缩了空间高度.
重庆正宗皮带伸缩头定位系统价格_刻度尺位移传感器-武汉索尔德测控技术有限公司
四川编码电缆皮带伸缩头定位系统制造商
刻度标尺定位系统具有以下特点:1,因为是无磨损的非接触式位置检测,所以使用寿命长;2,可以断续或连续检测,测距长达2公里,位移检测长度可以根据需要定制;3,耐污染能力超强,可用在水下、防蒸汽、耐酸碱;4,安装简单更换方便(无需改变现场环境),免维护;5,高稳定性、高可靠性、多种信号输出方式选择;6,具有反向极性保护功能、防雷击、防射频干扰、防静电;7,无需参考点的位移量输出,不怕掉电;8,位置的取样时间和测量长度没有关系;9,可以用在环形运动机械位置检测;10,刻度标尺可以埋在水泥地面内,方便安装和防护,不影响作业环境.
本公司研发生产的刻度标尺定位系统主要用于环形炉点加热、环冷小车定位(硅钢厂、烧结厂);卸料小车定位(矿山、烧结、球团、原料、焦化、炼铁、港口、石灰窑);天车定位(冷轧、热轧、剪切库、板坯库、钢卷库、成品库、原料库、垃圾发电厂、矿热炉车间料罐倒运、垃圾发电厂);推拨车机迁车台定位(翻车机);船舶下水定位(造船厂梳式滑道绞车同步控制);斗轮堆取料机防碰撞定位(原料厂、港口码头);门机定位,装卸船机定位(港口码头、水电站);高铁500米长钢轨运转系统;其它有轨移动设备的定位和集中控制.
刻度标尺定位系统采用电磁感应原理来检测移动设备的位移量,当游尺指针线圈中通入交变电流时,在游尺指针附近会产生交变磁场。刻度标尺近似处在一个交变的、均匀分布的磁场中,每对刻度标尺芯线会产生感应电动势.刻度生成仪信号通过电磁耦合方式传送到刻度标尺的感应环线上!刻度分析仪对接收到的信号进行相位比较。交叉线的信号相位与平行线的信号相位相同,地址为“0”;交叉线的信号相位与平行线的信号相位相反,地址为“1”,这样感应的地址信息是格雷码排列,由此确定游尺指针在刻度标尺长度方向上的位置. (2)基于双目视觉的自主编程 基于视觉反馈的自主示教是实现机器人路径自主规划的关键技术,其主要原理是:在一定条件下,由主控计算机通过视觉传感器沿焊缝自动跟踪、采集并识别焊缝图像,计算出焊缝的空间轨迹和方位(即位姿),并按优化焊接要求自动生成机器人焊枪多传感器信息融合自主编程 有研究人员采用力控制器,视觉传感器以及位移传感器构成一个高精度自动路径生成系统。系统配置如图8所示,该系统集成了位移、力、视觉控制,引入视觉伺服,可以根据传感器反馈信息来执行动作。该系统中机器人能够根据记号笔所绘制的线自动生成机器人路径,位移控制器用来保持机器人T C P点的位姿,视觉传感器用来使得机器人自动跟随曲线,力传感器用来保持TCP点与工件表面距离恒定。
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09
 粤公网安备44030402000848号
粤公网安备44030402000848号