

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09





萍乡小车刻度标尺位移传感器加工_线性位移传感器相关-武汉索尔德测控技术有限公司
- 产品名:刻度标尺位移传感器
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
全量程检测,可任意标定下料点,进行多点卸料和循环卸料,由此提高仓容。刻度分析仪采集到的小车位置数据通过网关传送到PLC模块,有多种数据传输模式可选:以太网、总线、串口等.刻度标尺是非接触位置检测,无磨损和滑差,所需通讯电缆极少,一次安装长久使用!如果因操作不当导致刻度标尺损坏,亦可通过刻度分析仪上显示的数字判断故障点,剖开刻度标尺外壳进行内部通讯线的焊接修补,不影响使用.刻度标尺位移传感器原理刻度标尺位移传感器采用法拉第电磁感应定律(磁力线传导原理)来检测移动搬运设备的位移量,当游尺指针线圈中通入交变电流时,在游尺指针附近会产生交变磁场.
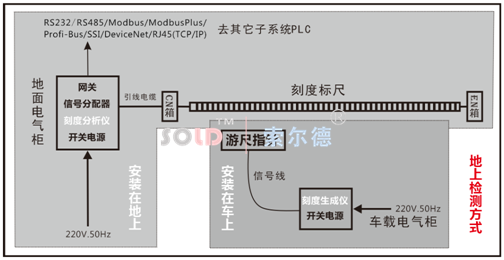
游尺指针相对刻度标尺平行非接触移动,游尺指针指向的刻度即是当前位置值,可以在车上或地上得到位移量,无需初始参考点,定位精度5毫米;可以断续或连续检测。防水、防油、防尘、耐酸碱,适用于冶金、矿山、水利、港口码头堆场等条件比较恶劣的环境!1刻度标尺位移传感器设备构成车载子系统:由游尺指针、车载电气柜(内含刻度生成仪、开关电源等)!地面子系统:由地面电气柜组成(内含刻度分析仪、开关电源、网关、信号分配器等)。
无锡智能天车刻度标尺位移传感器制造商_压力传感器相关-武汉索尔德测控技术有限公司
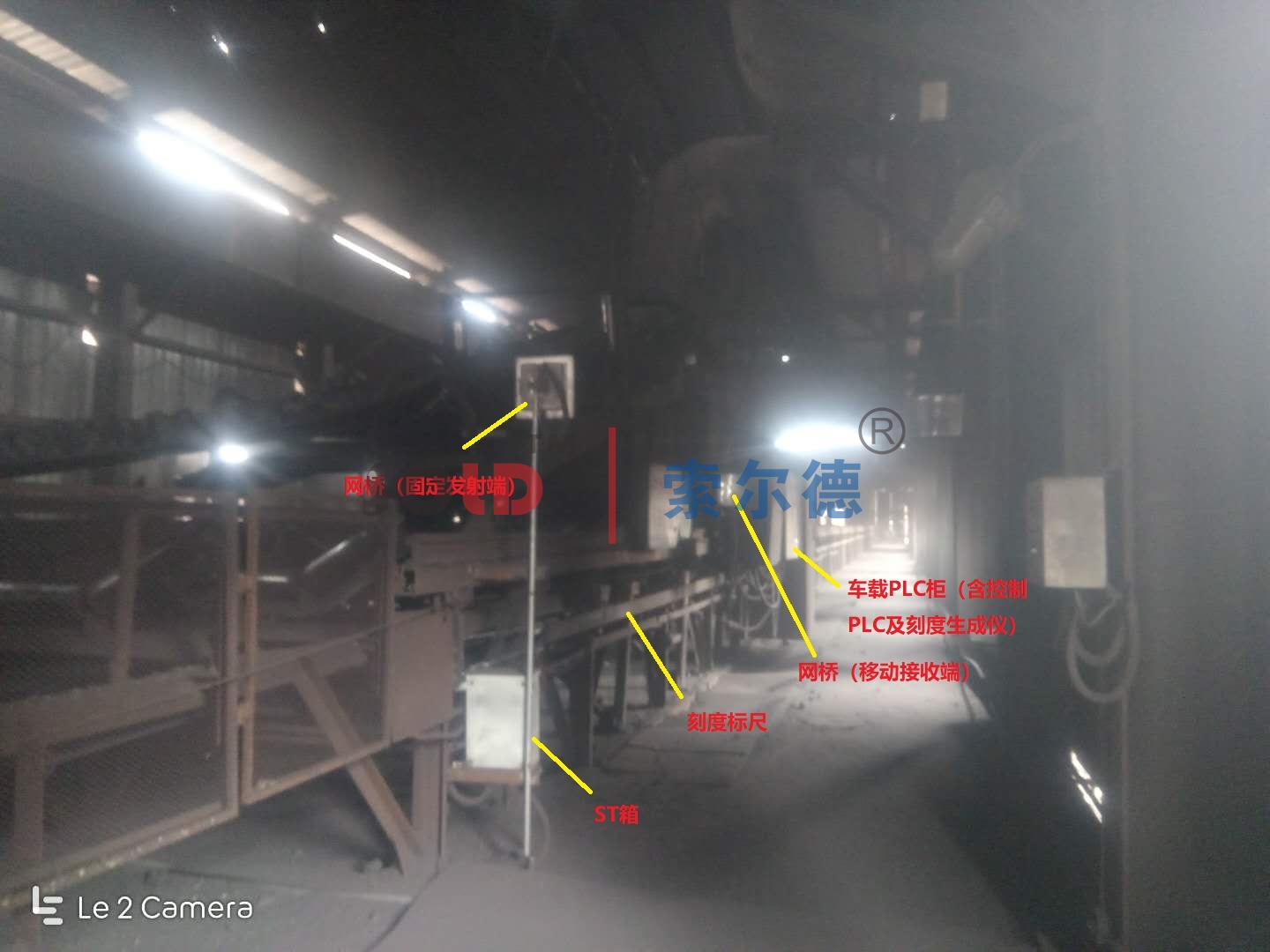
根据工艺,可实现远程控制,半自动、全自动操作;保障产量和质量,提升企业形象,提高企业产值和竞争力!4系统架构在小车行走轨道旁的托辊下方或者机侧上方安装刻度标尺,在小车上安装游尺指针,需要检测小车的行走距离是多长就铺设多长的刻度标尺位移传感器,先用米尺校准每个料仓的左右仓壁和料仓中心点,将此数据写入上位机数据库内,当小车走行时,刻度标尺可实时检测出小车当前所处位置,对比数据库之前标定的料仓位置数据即可知道小车走行到那个料仓。
江苏编码电缆位移传感器定制_称重传感器相关-武汉索尔德测控技术有限公司
刻度标尺近似处在一个交变的、均匀分布的磁场中,每对刻度标尺芯线会产生感应电动势.刻度生成仪信号通过电磁耦合方式传送到刻度标尺的感应环线上!刻度分析仪对接收到的信号进行相位比较!交叉线的信号相位与平行线的信号相位相同,地址为“0”;交叉线的信号相位与平行线的信号相位相反,地址为“1”,这样感应的地址信息是数字编码排列,由此确定游尺指针在刻度标尺长度方向上的位置,对应就是移动搬运设备走行位置。1刻度标尺位移传感器技术指标移动搬运设备地址测量精度:≤5mm,分辨率:2毫米,测量范围:满足现场;工作环境温度:系统工作温度:-15℃~+45℃,室外设备温度:-25℃~+75℃,非接触间隙:120mm±30mm,左右偏摆容差:±15mm;输入电源:220VAC±10%;耗电:地面电气柜50w,车载电气柜50w!
萍乡小车刻度标尺位移传感器加工

吉林格雷码母线位移传感器加工_线位移传感器相关-武汉索尔德测控技术有限公司
c)刻度生成仪工作频率:数字移位频点;工作温度:-25℃~+70℃;防护等级:IP54;尺寸为:长宽厚170*100*40(mm);安装方式:螺丝固定式!d)刻度分析仪工作频率:数字移位频点;工作温度:-25℃~+70℃;输出接口:RS232/485;防护等级:IP54;尺寸为:长宽厚175*115*35(mm);安装方式:螺丝固定式!e)信号分配器工作温度:-25℃~+70℃;防护等级:IP54;尺寸为:长宽厚125*85*40(mm);安装方式:卡轨式。

吉林刻度标尺位移传感器商家_压力传感器相关-武汉索尔德测控技术有限公司
工艺概况和需求1用户需求本项目有1台卸料小车需要进行位置检测!本方案采用刻度标尺位移传感器来检测卸料小车的实时位置,将小车的实时位置信息传送到系统PLC.通过刻度标尺位移传感器,可以实现小车行走位置准确可靠.2实施目标1)1台卸料小车的实时全量程位置检测;2)位置信号送到现场地面控制柜内PLC,通讯接口匹配;3功能特点实时检测小车当前位置,即所处仓位(槽位)识别;作业,优化流程,减少人工出错机率,可提高卸料效率,节约成本;防止错仓混料、下料时偏离下料口事故的发生;可减少工人劳动强度,保护岗位操作人员身体健康和人身安全;可提高工作效率、生产管理水平、自动化控制水平、信息化管理水平;实现信息的有效收集,有利于提高设备作业率,延长设备的使用寿命;位置联锁控制防止下料落空或超过极限位置发生碰撞/脱轨事故!
测距电缆是尼龙加纤合成材质,具有良好的防水性、抗老化性,能适应热涨冷缩、振动等原因而发生的变形,充分保证测距精度、线性度、重复性;核心电路模块采用并行差分数字电路检测技术,纯数字解析,具有较好的共模抑制性能,较高的灵敏度,较强的抗干扰能力,较快的检测速度;系统稳定可靠,功耗小,体积轻便,方便安装;为预防重力原因导致测距电缆下沉弯曲和对安装基础的影响,测距电缆外形尺寸≤宽70mm*厚15mm,±5%,重量≤0。 (2)基于双目视觉的自主编程 基于视觉反馈的自主示教是实现机器人路径自主规划的关键技术,其主要原理是:在一定条件下,由主控计算机通过视觉传感器沿焊缝自动跟踪、采集并识别焊缝图像,计算出焊缝的空间轨迹和方位(即位姿),并按优化焊接要求自动生成机器人焊枪多传感器信息融合自主编程 有研究人员采用力控制器,视觉传感器以及位移传感器构成一个高精度自动路径生成系统。系统配置如图8所示,该系统集成了位移、力、视觉控制,引入视觉伺服,可以根据传感器反馈信息来执行动作。该系统中机器人能够根据记号笔所绘制的线自动生成机器人路径,位移控制器用来保持机器人T C P点的位姿,视觉传感器用来使得机器人自动跟随曲线,力传感器用来保持TCP点与工件表面距离恒定。
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号