

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09



湖北质量好堆取料机无人化厂家客服_自动化成套控制系统-武汉索尔德测控技术有限公司
- 产品名:堆取料无人操作系统
- 产品价格:3000.00
- 尺寸:
- 产地:
- 公司:
实现料堆实时动态跟踪的三维成像方法,是利用堆取料机的走行、俯仰、回旋运动,带动安装在堆取料机悬臂前方的激光扫描装置对料堆进行动态扫描,对获得的激光扫描数据进行预处理、坐标转化、网格规范化处理、插值处理后生成规则的三维数据,生成整个料场的完整网格数据库;由三维成像控件从数据库中读出料场网格坐标信息,以料场为图像显示区域、料场地面为显示基面,实现区域内的坐标还原,完成料堆三维图像显示;高密度数据的快速采集在操作过程中,每秒可获得料堆10次以上轮廓;高速度的数据处理与分析,数据处理由计算机快速自动完成;简易的三维图形操作系统实现被测目标的立体重现,并能够进行图形的旋转、平移和局部放大等交互操作,测量结果一目了然!
本项目具有以下现实意义:改善劳动环境和降低劳动强度减少人为因素的影响和人力投入提高堆、取料机的自动化作业程度并稳定生产运行提高码头整体智能化作业管理水平保持行业技术前沿性!对于单机全自动系统而言,全自动化的硬件控制设备都在堆取料机中,主要包括PLC、激光料堆扫描,实时大机行走定位,俯仰角测量,旋臂角度测量各类辅助装置等;料堆扫描装置完成料堆原始三维数据及预处理,通过处理后的数据形成实时的模型;根据对取料机控制策略,完成斗轮堆取料机自动作业;堆取料机异常状态检测,防止碰撞、过载等异常情况的发生;控制中心设置人工干预装置如手柄操作盘等,当堆取料机工作出现异常时,可以进行人工干预,主要包括停机,暂停堆取料、大车后退、大臂旋转等操作;单机PLC作为控制中心,需根据主控PLC传送过来的堆取料任务的范围,实现堆取料的逻辑控制及其操作的实现!
利用堆取料机的走行、俯仰、回旋运动,带动安装在堆取料机悬臂前方的激光扫描装置对料堆进行动态扫描,对获得的激光扫描数据进行预处理、坐标转化、网格规范化处理、插值处理后生成规则的三维数据,最终生成整个料场的完整网格数据库,并实时更新数据库内数据内容,从而实现终端显示的三维料场图像实时动态更新.生成的实时三维料堆图像数据,不仅能让作业人员动态掌握料场料堆的堆放情况,更为重要的是通过对料堆形状的实时识别,并实时动态对料堆进行数据化处理保存,为下一步全自动堆取料工艺提供了有力的支撑和保证!
如果您看到这段话,说明您对我们堆取料无人操作系统感兴趣,不要犹豫,给我们一个机会,也给自己一个机会。 拿起手机来拨打我们的电话。经理等待着您的每一次致电:13277934095 让武汉索尔德测控技术有限公司为您服务, 我们在武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室这里等您。
湖北质量好堆取料机无人化厂家客服
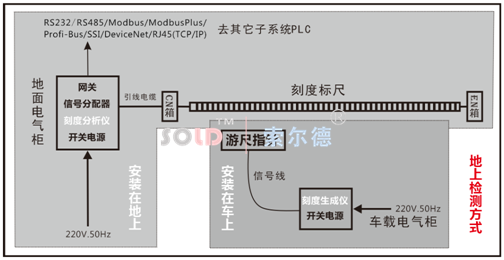
并实时更新数据库内数据内容,同时数据库数据内容的变化触发三维成像控件从数据库读取一次数据,从而实现终端显示的三维料场图像实时动态更新!具体的说:数据预处理的过程是,堆取料机实时运动状态数据是通过堆取料机的走行、俯仰、回旋刻度标尺输出的走行值、俯仰角度、回旋角度获得,堆取料机悬臂的动作反应在俯仰角度、回旋角度的变化上;激光扫描装置采集的数据是发射光心在0到180度范围内,周期性的以每0!5度或0。25度发射角度间隔发射光束,通过测量发射光束与料堆表面反射光束的时间差得出激光扫描装置发射光心到料堆反射表面空间距离;激光扫描装置安装相对位置数据是激光扫描装置到俯仰轴的距离,俯仰角度在零度时激光扫描装置相对于地面的高度;堆取料机实时运动状态数据与激光扫描装置采集的数据在时间上实现同步匹配.
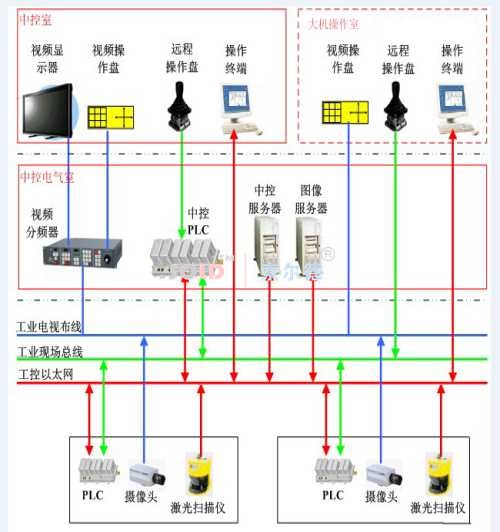
采用PLC控制系统,变频调速,辅助检测设备(料堆扫描仪、位置检测装置、工控机,皮带检测,摄像头装置等)来实现堆取料机的自动控制;堆取料自动控制中采用现场ControlNet,总线和工业以太网总线方式进行数据交换;三维数据采集模块!负责堆取料机的实时位置信息的采集、激光扫描装置的实时数据的采集,并将采集来的数据进行初步处理,形成料堆表面的三维点云数据.三维数据计算模块.负责接三维采集模块形成的点云数据,根据点云数据重构料堆的三维模型数据库等。
安徽索尔德GPS定位北斗控制系统_车辆监控GPS定位相关-武汉索尔德测控技术有限公司
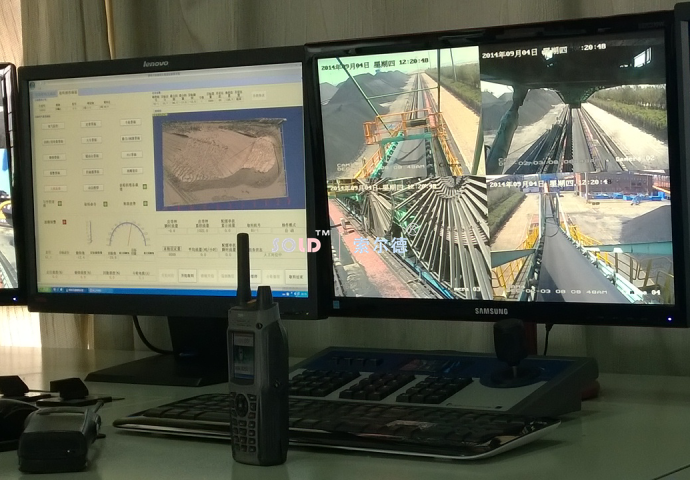
控制机从管理机获得作业计划或者自行编制作业计划,根据作业料堆在料场中的三维空间形状数据,结合堆取料机的物理尺寸数据,通过优化计算获得堆取料机的取料或堆料位置,形成作业指令,将作业指令发送到相应的堆取料机PLC,中控操作人员确认作业任务(作业料堆、作业料种、作业吨位等)正确和环境安全因素后,由堆取料机进行无人驾驶的堆、取料作业.在堆取料过程中,中控操作人员可以通过监控终端和视频终端实时监视现场作业过程,必要时可以通过位于控制室的操作台对堆、取料作业进行手动干预和作业调整!
浙江高可靠性GPS定位_手持GPS定位仪相关-武汉索尔德测控技术有限公司
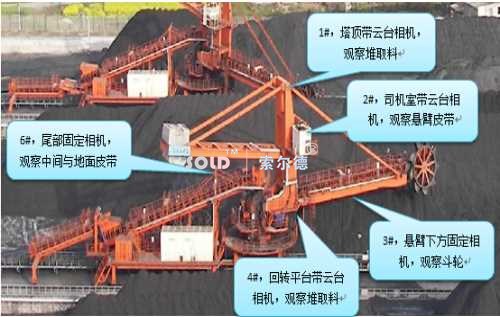
系统优点料堆激光测量系统具有精度高,稳定性好,扩展能力强等优点!激光测量属于非接触式测量方案,在测量过程中与被测物没有直接物理接触,测量系统因此也不会因摩擦而带来误差.测量系统中使用多个激光扫描仪配置,大大提高了系统的测量点密度,消除测量死角!同时也为系统功能的扩展提供了非常有利的条件!堆取料机自动控制系统,主要是指在堆取料机作业时,在保证充分发挥堆取料机的堆取料能力和其它功能基础上,堆取料机司机室内没有操作人员进行操作和监视,控制室内也不需要操作人员进行全程的控制操作。
武汉索尔德测控技术有限公司是一家专注自动化成套控制系统的企业,在堆取料无人操作系统领域深耕十几年,对于堆取料机无人化,有着敏锐的市场嗅觉,丰富的优化经验,扎实的技术团队。秉承互利互惠,合作双赢的理念,坚持客户至上,信誉的原则。致力于从多渠道,多方位,多平台为客户提供的堆取料无人操作系统服务,并受到了客户的一致好评。

云南煤场GPS定位商家-武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号