

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09






斗轮机GPS定位_汽车在线gps定位相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
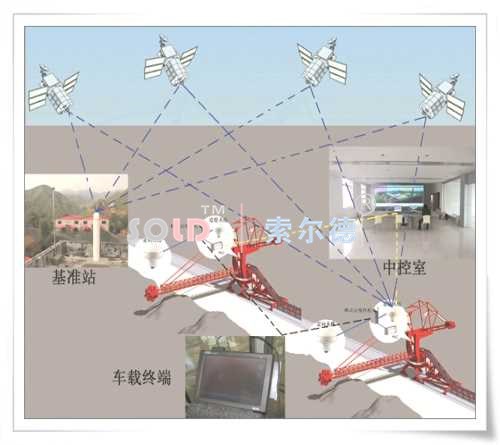
基准站差分系统主要包括基准站GPS卫星jieshou机和差分数据电台。基准站作为整个系统的基准必须建立在一个干扰少,基础稳定的位置,以便保证整个系统的定位精度以及全天候使用。一般来说基准站系统建立空旷的房屋楼顶上,单独建立立柱必须做好防雷措施!流动站子系统在每台堆取料机上安装两台流动站,流动站卫星jieshou机天线分别安放在大机回转中心和悬臂中部或者头部中心点处!两台流动站实时检测空间的三维坐标信息,并计算出每台堆取料机的位置、俯仰、角度信息等,并通过数据链路传输给中控室的PLC主机,这样根据“两点确定一条直线”原理,中控PLC就可以实时的知道堆取料机的大机回转中心和堆取料机的悬臂头部中心所在轴线的位置了.
由于堆取料机是较大的设备,其惯性较大,在启动和停止时也是硬性的,所以在工作过程中会产生很大的撞击和震动,噪音污染严重,严重影响其安全性和有关零部件的寿命,易于损坏设备,由此设备位置控制显得尤为重要.3悬臂采用的检测技术通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高!

四川桥式起重机物流管理系统_索尔德自动化成套控制系统推荐-武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司主营:GPS定位系统等等产品,涉及自动化成套控制系统等等行业。 公司实力雄厚,重信用、守合同、保证产品质量,以多品种经营特色和薄利多销的原则,赢得了广大客户的信任。 多年来致力于自动化成套控制系统,拥有众多的专业人才,并通过多年以来不断的积累,在业界形成良好的口碑。 售后方面也赢得了用户的一致好评。您的满意是我们一直前进的动力。

辽宁智能环冷小车定位系统优选供应商-武汉索尔德测控技术有限公司
我公司是专业从事物料搬运设备定位和控制的民营高科技企业,为用户提供专业技术咨询、技术资料、方案设计、包装运输、设备点交、安装指导、技术培训、回访服务等.为了解决客户后顾之忧,本公司特推行“四制四服务”的售后服务制度:四项制度1)30分钟内回复制:接到客户电话起30分钟内做出回应!2)24小时到场制:需要现场解决问题的我公司售后技术工程师在24小时内到达现场!3)终身服务制:对我公司产品实行终身售后服务.
斗轮机GPS定位
如果您想了解GPS定位系统更多信息,请致电 经理:13277934095,或者您直接到我们公司总部一起交流研讨,地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,我们期待您的致电或来访。
GPS定位系统1GNSS系统组成GPS是全球卫星导航系统的总称,包括GPS(美国)、GLONASS(俄罗斯)、伽利略(欧盟)、北斗(中国)总共四套导航系统.而目前在轨运行并能真正实现民用定位功能的只有GPS和GLONASS两套定位系统.主要特点:具有全球覆盖、全天候、实时导航定位等优点.2GPS系统介绍GPS系统主要由三部分构成:空间卫星部分、地面监控部分、用户GNSS接收机部分!卫星部分主要是再轨运行的专门用于导航的卫星,目前GPS和GLONASS在轨运行的卫星总共有60多颗,每颗卫星均在不间断地向地球播发调制在两个频段上的卫星信号!
现有的防碰撞方法是根据两台堆取料机是否处于同一个场垛进行判断,如果两台堆取料机不在同一个场垛就可以正常作业!两台堆取料机进入一个场垛进行作业时,就对两台堆取料机同时进行锁定,使其不能工作,由此避免堆取料机之间发生碰撞,这严重影响了堆取料机的同场作业。由于以上原因,当前都采用人工监控的方法来避免空间碰撞事故!现有的防碰撞方法无法有效避免堆取料机空间防碰撞问题,使得两台堆取料机无法同时在同一个堆场中安全作业,严重影响效率.
4)处理结果满意制:以解决客户问题为结果,不推诿!四项服务1)技术咨询服务:对客户所有售前、售中、售后的技术咨询提供24小时热线,做到有帮助!2)产品选型服务:对准备选用我公司产品的客户提供详细选型指导,做到准确定型号!3)用户培训服务:对使用我公司产品的客户提供现场或网络培训,做到能解决问题!4)备件供应服务:对公司产品的后续备品备件提供服务,做到有承接,能替代!GPS定位系统在传统的定位方式弊端上,有效解决了两台堆取料机在进入同一个场垛作业时,无法有效避免防碰撞以及在同一堆场安全作业的问题!
di(i=1,2,3,4)分别为卫星1,卫星2,卫星3,卫星4到接收机之间的距离。ti(i=1,2,3,4)分别为卫星1,卫星2,卫星3,卫星4的信号到达接收机所经历的时间。c为GPS信号的传播速度(即光速)。4个方程式中各个参数意义如下:x,y,z为待测点坐标的空间直角坐标。
xi,yi,zi(i=1,2,3,4)分别为卫星1、卫星2、卫星3、卫星4在t时刻的空间直角坐标,可由卫星导航电文求得。Vti(i=1,2,3,4)分别为卫星1,卫星2,卫星3,卫星4的卫星钟的钟差,由卫星星历提供。Vt0为接收机的钟差。
由以上4个方程即可解算出待测点的坐标x,y,z和接收机的钟差Vt0。目前GPS系统提供的定位精度低于10m,而为得到更高的定位精度,通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。
用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号