

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09



上海斗轮机GPS定位_gps定位数据相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
系统简介1概述随着水路运输业的快速发展,现代港口规模和吞吐量不断增长,港口各种装卸设备数量不断增加,如何可靠使用这些装卸设备是各港口单位关心的问题。港口装卸设备中主要的斗轮堆取料机又称悬臂式堆取料机,是散货堆场作业的核心设备。它是堆取料合一的机械,即是一种挖取和堆存煤炭、矿石、砂石等松散物料的机械.它不仅适用于电厂,而且在码头、港口也很适用,大多数的转运煤及松散物料的码头、港口都采用斗轮堆取料机.斗轮堆取料机的采用,大大缩短了堆取时间,提高了工作效率,减轻了工人劳动强度!
武汉索尔德测控技术有限公司坐落于武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,是湖北武汉洪山区知名企业,公司业务联系人经理:13277934095, 期待您的来电咨询更多关于GPS定位相关信息!

浙江堆取料机GPS定位易于维护-武汉索尔德测控技术有限公司
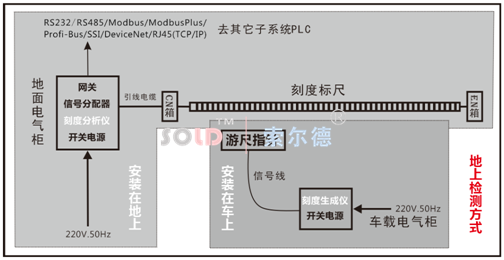
武汉索尔德针对这一棘手问题,研发生产了新一代GPS定位系统,本系统进行数据采集和空间几何算法,再将计算结果传给PLC,进行大机位置检测和防碰撞控制的计算与报警,还可以检测悬臂旋转角度及俯仰角度,效果显著!不但解决了其它位移传感器检测大机位置不准确的问题,而且节省了检测悬臂旋转角度及俯仰角度的传感器,消除了数据检测中间转换的误差,提高了数据准确度!同时,计算过程简单、直观,可实现多台堆取料机同场同时作业,实时检测各个悬臂之间的距离,防止发生碰撞,提高了安全性和作业效率,可用于多种类型的堆取料机,提高同场作业效率高达80%左右,可以实现无人操作!

山西立体仓库物流管理系统厂家_索尔德自动化成套控制系统推荐-武汉索尔德测控技术有限公司
现有的防碰撞方法是根据两台堆取料机是否处于同一个场垛进行判断,如果两台堆取料机不在同一个场垛就可以正常作业。两台堆取料机进入一个场垛进行作业时,就对两台堆取料机同时进行锁定,使其不能工作,由此避免堆取料机之间发生碰撞,这严重影响了堆取料机的同场作业!由于以上原因,当前都采用人工监控的方法来避免空间碰撞事故.现有的防碰撞方法无法有效避免堆取料机空间防碰撞问题,使得两台堆取料机无法同时在同一个堆场中安全作业,严重影响效率!
并对相邻的堆取料机进行两两比较,计算出他们之间的安全距离,臂架俯仰和旋转的角度.一旦相邻的堆取料机之间的距离小于安全距离或旋转、俯仰角度超出安全角度时,软件将自动向操作人员发出报警信息以及停机信号,防止意外事故的发生!通过RTK方式来检测悬臂位置信息可以到厘米级,并且不受自身行车轮打滑和其它编码器累积误差的影响,比现有的防碰撞方法更加准确!克服了现有技术中由于悬臂空间位置反馈都是采用行走、旋转、俯仰三个编码器的数值计算,而造成的误差累积问题!
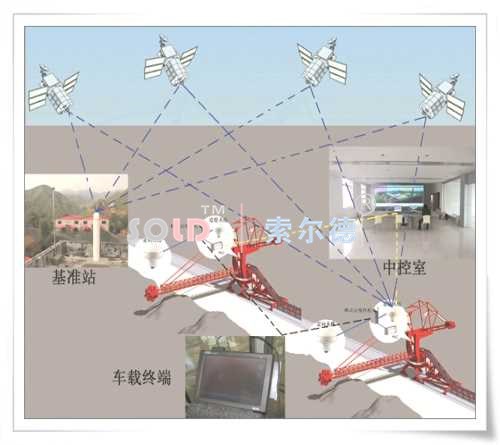
GPS定位系统1GNSS系统组成GPS是全球卫星导航系统的总称,包括GPS(美国)、GLONASS(俄罗斯)、伽利略(欧盟)、北斗(中国)总共四套导航系统!而目前在轨运行并能真正实现民用定位功能的只有GPS和GLONASS两套定位系统.主要特点:具有全球覆盖、全天候、实时导航定位等优点!2GPS系统介绍GPS系统主要由三部分构成:空间卫星部分、地面监控部分、用户GNSS接收机部分。卫星部分主要是再轨运行的专门用于导航的卫星,目前GPS和GLONASS在轨运行的卫星总共有60多颗,每颗卫星均在不间断地向地球播发调制在两个频段上的卫星信号!
上海斗轮机GPS定位
它的特点主要表现在以下方面:堆取料机走行位置、装卸位置检测;可实现堆取料机自动走行,自动堆取料;实现位置联锁,可以防止两端掉道或碰撞事故;与堆取料机小皮带联锁控制,防止混料、错料、堵料事故;可进行鳞状堆积预混匀作业,以提高原料成分的均匀度、减少粒度偏析;实现堆取料机远程监控功能;结合皮带秤数据对堆场堆存量数字化管理;严格控制堆料形状和取料规律,可以大大提高料场的存储容量,提高料场的利用率变起点定终点工艺可将料堆截面堆成长方形,减少端部料的产生和浪费,也同时减少铲车进场的作业量!

上海库房物流管理系统_索尔德自动化成套控制系统厂家-武汉索尔德测控技术有限公司
我们的公司名称是武汉索尔德测控技术有限公司。我们公司在自动化成套控制系统这个行业有丰富的经验,可以提供的咨询、的产品。 主营产品主要有GPS定位系统,该产品是关于GPS定位的, 如果想进一步的了解其他信息,欢迎随时联系我们。
GPS接收机对码的量测就可得到卫星到接收机的距离,由于含有接收机卫星钟的误差及大气传播误差,故称为伪距。对0A码测得的伪距称为UA码伪距,精度约为20米左右,对P码测得的伪距称为P码伪距,精度约为2米左右。 GPS接收机对收到的卫星信号,进行解码或采用其它技术,将调制在载波上的信息去掉后,就可以恢复载波。
严格而言,载波相位应被称为载波拍频相位,它是收到的受多普勒频 移影响的卫星信号载波相位与接收机本机振荡产生信号相位之差。一般在接收机钟确定的历元时刻量测,保持对卫星信号的跟踪,就可记录下相位的变化值,但开始观测时的接收机和卫星振荡器的相位初值是不知道的,起始历元的相位整数也是不知道的,即整周模糊度,只能在数据处理中作为参数解算。
相位观测值的精度高至毫米,但前提是解出整周模糊度,因此只有在相对定位、并有一段连续观测值时才能使用相位观测值,而要达到优于米级的定位精度也只能采用相位观测值。 按定位方式,GPS定位分为单点定位和相对定位(差分定位)。单点定位就是根据一台接收机的观测数据来确定接收机位置的方式,它只能采用伪距观测量,可用于车船等的概略导航定位。
相对定位(差分定位)是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法,它既可采用伪距观测量也可采用相位观测量,大地测量或工程测量均应采用相位观测值进行相对定位。 在GPS观测量中包含了卫星和接收机的钟差、大气传播延迟、多路径效应等误差,在定位计算时还要受到卫星广播星历误差的影响,在进行相对定位时大部分公共误差被抵消或削弱,因此定位精度将大大提高,双频接收机可以根据两个频率的观测量抵消大气中电离层误差的主要部分,在精度要求高,接收机间距离较远时(大气有明显差别),应选用双频接收机。
在定位观测时,若接收机相对于地球表面运动则称为动态定位,如用于车船等概略导航定位的精度为30一100米的伪距单点定位,或用于城市车辆导航定位的米级精度的伪距差分定位,或用于测量放样等的厘米级的相位差分定位(RTK),实时差分定位需要数据链将 两个或多个站的观测数据实时传输到一起计算。
在定位观测时若接收机相对于地球表面静止,则称为静态定位,在进行控制网观测时一般均采用这种方式由几台接收机同时观测,它能*太限度地发挥GPS的定位精度,专用于这种目的这种目的的接收机被称为大地型接收机,是接收机中性能好的一类。目前,GPS已经能 够达到地壳形变观测的精度要求,IGS的常年观测台站已经能构成毫米级的全球坐标框架。
。
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号