

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09



山东斗轮机GPS定位商家_gps差分定位相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:索尔德
- 产地:武汉
- 公司:索尔德
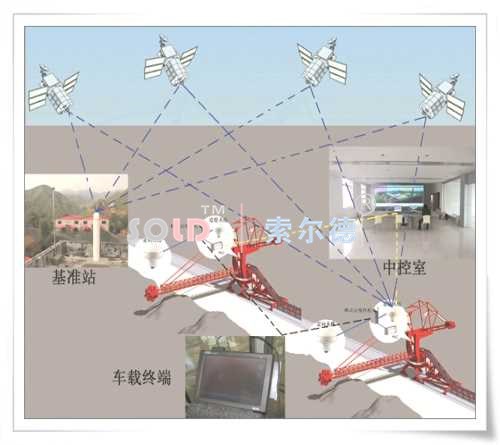
基准站差分系统主要包括基准站GPS卫星jieshou机和差分数据电台。基准站作为整个系统的基准必须建立在一个干扰少,基础稳定的位置,以便保证整个系统的定位精度以及全天候使用!一般来说基准站系统建立空旷的房屋楼顶上,单独建立立柱必须做好防雷措施!流动站子系统在每台堆取料机上安装两台流动站,流动站卫星jieshou机天线分别安放在大机回转中心和悬臂中部或者头部中心点处!两台流动站实时检测空间的三维坐标信息,并计算出每台堆取料机的位置、俯仰、角度信息等,并通过数据链路传输给中控室的PLC主机,这样根据“两点确定一条直线”原理,中控PLC就可以实时的知道堆取料机的大机回转中心和堆取料机的悬臂头部中心所在轴线的位置了。
它的特点主要表现在以下方面:堆取料机走行位置、装卸位置检测;可实现堆取料机自动走行,自动堆取料;实现位置联锁,可以防止两端掉道或碰撞事故;与堆取料机小皮带联锁控制,防止混料、错料、堵料事故;可进行鳞状堆积预混匀作业,以提高原料成分的均匀度、减少粒度偏析;实现堆取料机远程监控功能;结合皮带秤数据对堆场堆存量数字化管理;严格控制堆料形状和取料规律,可以大大提高料场的存储容量,提高料场的利用率变起点定终点工艺可将料堆截面堆成长方形,减少端部料的产生和浪费,也同时减少铲车进场的作业量!
宁夏武汉环冷小车定位系统厂家电话_专业自动化成套控制系统-武汉索尔德测控技术有限公司

辽宁环冷小车定位系统厂家客服_高可靠性自动化成套控制系统优选供应商-武汉索尔德测控技术有限公司

天津索尔德GPS定位优选供应商_GPS相关-武汉索尔德测控技术有限公司
山东斗轮机GPS定位商家

上海库房物流管理系统_索尔德自动化成套控制系统厂家-武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司主营:GPS定位系统等等产品,涉及自动化成套控制系统等等行业。 公司实力雄厚,重信用、守合同、保证产品质量,以多品种经营特色和薄利多销的原则,赢得了广大客户的信任。 多年来致力于自动化成套控制系统,拥有众多的专业人才,并通过多年以来不断的积累,在业界形成良好的口碑。 售后方面也赢得了用户的一致好评。您的满意是我们一直前进的动力。
4)处理结果满意制:以解决客户问题为结果,不推诿。四项服务1)技术咨询服务:对客户所有售前、售中、售后的技术咨询提供24小时热线,做到有帮助!2)产品选型服务:对准备选用我公司产品的客户提供详细选型指导,做到准确定型号.3)用户培训服务:对使用我公司产品的客户提供现场或网络培训,做到能解决问题!4)备件供应服务:对公司产品的后续备品备件提供服务,做到有承接,能替代.GPS定位系统在传统的定位方式弊端上,有效解决了两台堆取料机在进入同一个场垛作业时,无法有效避免防碰撞以及在同一堆场安全作业的问题。
GPS定位系统1GNSS系统组成GPS是全球卫星导航系统的总称,包括GPS(美国)、GLONASS(俄罗斯)、伽利略(欧盟)、北斗(中国)总共四套导航系统.而目前在轨运行并能真正实现民用定位功能的只有GPS和GLONASS两套定位系统!主要特点:具有全球覆盖、全天候、实时导航定位等优点!2GPS系统介绍GPS系统主要由三部分构成:空间卫星部分、地面监控部分、用户GNSS接收机部分.卫星部分主要是再轨运行的专门用于导航的卫星,目前GPS和GLONASS在轨运行的卫星总共有60多颗,每颗卫星均在不间断地向地球播发调制在两个频段上的卫星信号。
武汉索尔德针对这一棘手问题,研发生产了新一代GPS定位系统,本系统进行数据采集和空间几何算法,再将计算结果传给PLC,进行大机位置检测和防碰撞控制的计算与报警,还可以检测悬臂旋转角度及俯仰角度,效果显著!不但解决了其它位移传感器检测大机位置不准确的问题,而且节省了检测悬臂旋转角度及俯仰角度的传感器,消除了数据检测中间转换的误差,提高了数据准确度。同时,计算过程简单、直观,可实现多台堆取料机同场同时作业,实时检测各个悬臂之间的距离,防止发生碰撞,提高了安全性和作业效率,可用于多种类型的堆取料机,提高同场作业效率高达80%左右,可以实现无人操作!
如果您看到这段话,说明您对我们GPS定位系统感兴趣,不要犹豫,给我们一个机会,也给自己一个机会。 拿起手机来拨打我们的电话。经理等待着您的每一次致电:13277934095 让武汉索尔德测控技术有限公司为您服务, 我们在武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室这里等您。

云南钢卷库物流管理系统供应厂家_桥式起重机自动化成套控制系统-武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号