

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09




上海混匀料场GPS定位易于维护_打开gps定位相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
我公司是专业从事物料搬运设备定位和控制的民营高科技企业,为用户提供专业技术咨询、技术资料、方案设计、包装运输、设备点交、安装指导、技术培训、回访服务等!为了解决客户后顾之忧,本公司特推行“四制四服务”的售后服务制度:四项制度1)30分钟内回复制:接到客户电话起30分钟内做出回应!2)24小时到场制:需要现场解决问题的我公司售后技术工程师在24小时内到达现场.3)终身服务制:对我公司产品实行终身售后服务.
传统堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光测距传感器、行走限位开关、RFID方式!这几种传感器在检测位置时多数灵敏度低、寿命短、故障率高、可靠性低,操作繁锁,而且存在溜放环节(即失控区),致使半自动操作和全自动操作难以可靠稳定运行!通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高,无法有效解决同一个场垛中两台堆取料机的防碰撞以及同时作业的问题!
如果您想咨询GPS定位更多信息,请致电经理:13277934095;珍惜与每个对GPS定位系统有需求的企业、个人 能有进一步的交流机会,欢迎各大企业、个人光临公司本部,武汉索尔德测控技术有限公司详细地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室。
上海混匀料场GPS定位易于维护

青海烧结环冷小车定位系统供应厂家_高可靠性自动化成套控制系统哪家好-武汉索尔德测控技术有限公司
光电编码器装置,整套装置安装在驱动电机前部的一个金属壳体内,由盘状齿轮与定位车齿条啮合,通过驱动轴驱动编码器.盘状齿轮的圆周与定位车驱动小齿轮的圆周相同。编码器由传动齿轮自下而上通过减速机、联轴节驱动,实现定位车的位置检测!这几种检测位置的方式均存在一定缺陷,具体表现如下:1)人眼定位受制于眼睛健康状况和精神状态,环境影响比较大,作业时间长;2)光电编码器装置在车轮打滑就会形成累计误差,相对定位的机械接触工作方式;3)激光位移传感器在不洁净环境会失去作用,轨道沉降导致车辆走行抖动会使反光板靶位不准,亦会导致位置检测不准;4)行走限位开关由于是点定位,对连续性位置检测存在盲区;5)RFID方式是无线点定位,存在漏读现象,延时较大;故这几种传感器在检测位置时多数为机械式、灵敏度低、寿命短、故障率高、可靠性低,操作繁锁,而且存在溜放环节(即失控区),致使半自动操作难以可靠稳定运行。
为提高装卸均化作业的效率和安全问题,应保证堆取料机具备寻堆认址、定位,自动确定各层料堆起点、终点及位置跟踪、终点记忆、料流对中心、电缆保护、整机自动堆取料,从而实现流畅和堆取料自动作业!同时中控室能够对作业过程进行监视!所以有必要对堆取料机大机位置进行连续跟踪、悬臂三维位置实时检测,解决堆取料作业过程中空间防碰撞的难题!2目前大机采用的定位方式目前堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光位移传感器、行走限位开关、RFID方式!

辽宁专业环冷小车定位系统安装_高可靠性自动化成套控制系统优选供应商-武汉索尔德测控技术有限公司
辽宁环冷小车定位系统售后服务商_烧结自动化成套控制系统-武汉索尔德测控技术有限公司
4)处理结果满意制:以解决客户问题为结果,不推诿。四项服务1)技术咨询服务:对客户所有售前、售中、售后的技术咨询提供24小时热线,做到有帮助.2)产品选型服务:对准备选用我公司产品的客户提供详细选型指导,做到准确定型号.3)用户培训服务:对使用我公司产品的客户提供现场或网络培训,做到能解决问题!4)备件供应服务:对公司产品的后续备品备件提供服务,做到有承接,能替代。GPS定位系统在传统的定位方式弊端上,有效解决了两台堆取料机在进入同一个场垛作业时,无法有效避免防碰撞以及在同一堆场安全作业的问题.
di(i=1,2,3,4)分别为卫星1,卫星2,卫星3,卫星4到接收机之间的距离。ti(i=1,2,3,4)分别为卫星1,卫星2,卫星3,卫星4的信号到达接收机所经历的时间。c为GPS信号的传播速度(即光速)。4个方程式中各个参数意义如下:x,y,z为待测点坐标的空间直角坐标。
xi,yi,zi(i=1,2,3,4)分别为卫星1、卫星2、卫星3、卫星4在t时刻的空间直角坐标,可由卫星导航电文求得。Vti(i=1,2,3,4)分别为卫星1,卫星2,卫星3,卫星4的卫星钟的钟差,由卫星星历提供。Vt0为接收机的钟差。
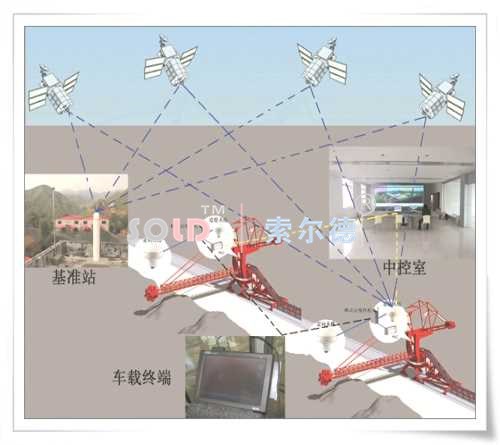
由以上4个方程即可解算出待测点的坐标x,y,z和接收机的钟差Vt0。目前GPS系统提供的定位精度低于10m,而为得到更高的定位精度,通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。
用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号