

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09






安徽堆取料机GPS定位推荐_gps是怎么定位的相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
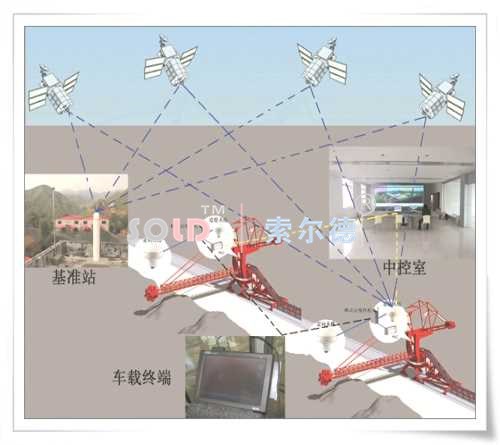
基准站差分系统主要包括基准站GPS卫星jieshou机和差分数据电台。基准站作为整个系统的基准必须建立在一个干扰少,基础稳定的位置,以便保证整个系统的定位精度以及全天候使用!一般来说基准站系统建立空旷的房屋楼顶上,单独建立立柱必须做好防雷措施。流动站子系统在每台堆取料机上安装两台流动站,流动站卫星jieshou机天线分别安放在大机回转中心和悬臂中部或者头部中心点处!两台流动站实时检测空间的三维坐标信息,并计算出每台堆取料机的位置、俯仰、角度信息等,并通过数据链路传输给中控室的PLC主机,这样根据“两点确定一条直线”原理,中控PLC就可以实时的知道堆取料机的大机回转中心和堆取料机的悬臂头部中心所在轴线的位置了!
系统简介1概述随着水路运输业的快速发展,现代港口规模和吞吐量不断增长,港口各种装卸设备数量不断增加,如何可靠使用这些装卸设备是各港口单位关心的问题!港口装卸设备中主要的斗轮堆取料机又称悬臂式堆取料机,是散货堆场作业的核心设备。它是堆取料合一的机械,即是一种挖取和堆存煤炭、矿石、砂石等松散物料的机械。它不仅适用于电厂,而且在码头、港口也很适用,大多数的转运煤及松散物料的码头、港口都采用斗轮堆取料机!斗轮堆取料机的采用,大大缩短了堆取时间,提高了工作效率,减轻了工人劳动强度!
并对相邻的堆取料机进行两两比较,计算出他们之间的安全距离,臂架俯仰和旋转的角度!一旦相邻的堆取料机之间的距离小于安全距离或旋转、俯仰角度超出安全角度时,软件将自动向操作人员发出报警信息以及停机信号,防止意外事故的发生。通过RTK方式来检测悬臂位置信息可以到厘米级,并且不受自身行车轮打滑和其它编码器累积误差的影响,比现有的防碰撞方法更加准确.克服了现有技术中由于悬臂空间位置反馈都是采用行走、旋转、俯仰三个编码器的数值计算,而造成的误差累积问题!
浙江煤场GPS定位推荐_手持GPS定位仪相关-武汉索尔德测控技术有限公司
安徽堆取料机GPS定位推荐
我公司是专业从事物料搬运设备定位和控制的民营高科技企业,为用户提供专业技术咨询、技术资料、方案设计、包装运输、设备点交、安装指导、技术培训、回访服务等!为了解决客户后顾之忧,本公司特推行“四制四服务”的售后服务制度:四项制度1)30分钟内回复制:接到客户电话起30分钟内做出回应。2)24小时到场制:需要现场解决问题的我公司售后技术工程师在24小时内到达现场!3)终身服务制:对我公司产品实行终身售后服务。
传统堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光测距传感器、行走限位开关、RFID方式.这几种传感器在检测位置时多数灵敏度低、寿命短、故障率高、可靠性低,操作繁锁,而且存在溜放环节(即失控区),致使半自动操作和全自动操作难以可靠稳定运行!通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高,无法有效解决同一个场垛中两台堆取料机的防碰撞以及同时作业的问题!
现有的防碰撞方法是根据两台堆取料机是否处于同一个场垛进行判断,如果两台堆取料机不在同一个场垛就可以正常作业。两台堆取料机进入一个场垛进行作业时,就对两台堆取料机同时进行锁定,使其不能工作,由此避免堆取料机之间发生碰撞,这严重影响了堆取料机的同场作业!由于以上原因,当前都采用人工监控的方法来避免空间碰撞事故!现有的防碰撞方法无法有效避免堆取料机空间防碰撞问题,使得两台堆取料机无法同时在同一个堆场中安全作业,严重影响效率!
吉林武汉环冷小车定位系统厂家直销_高可靠性自动化成套控制系统厂家客服-武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司坐落于武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,是湖北武汉洪山区知名企业,公司业务联系人经理:13277934095, 期待您的来电咨询更多关于GPS定位相关信息!
自动化成套控制系统行业厂商武汉索尔德测控技术有限公司,是一家专注于手机壳服务的企业,在业内享有盛名,获得一致好评,如果您对 GPS定位感兴趣,那么本页面可以很好的带您了解GPS定位,或者想了解GPS定位系统相关更多信息,请移步我们的官网或者与我们 取得联系,我们将竭诚为您服务。

山东烧结环冷小车定位系统安装-武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号