

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09





安徽GPS定位_汽车在线gps定位相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
由于堆取料机是较大的设备,其惯性较大,在启动和停止时也是硬性的,所以在工作过程中会产生很大的撞击和震动,噪音污染严重,严重影响其安全性和有关零部件的寿命,易于损坏设备,由此设备位置控制显得尤为重要.3悬臂采用的检测技术通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高.
公司是一家以自动化成套控制系统为主的企业,主打GPS定位,更多产品详详情请拨打电话:13277934095经理 或到访武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室。武汉索尔德测控技术有限公司期待与您一起合作共赢,在追求低价格高效率,快速度的同时,更注重质量的保证,努力为客户做好每一件产品,做到在成长中求发展,始终保持一种尽善尽美的工作态度,满怀希望和热情的朝着目标努力。
为提高装卸均化作业的效率和安全问题,应保证堆取料机具备寻堆认址、定位,自动确定各层料堆起点、终点及位置跟踪、终点记忆、料流对中心、电缆保护、整机自动堆取料,从而实现流畅和堆取料自动作业.同时中控室能够对作业过程进行监视!所以有必要对堆取料机大机位置进行连续跟踪、悬臂三维位置实时检测,解决堆取料作业过程中空间防碰撞的难题!2目前大机采用的定位方式目前堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光位移传感器、行走限位开关、RFID方式!
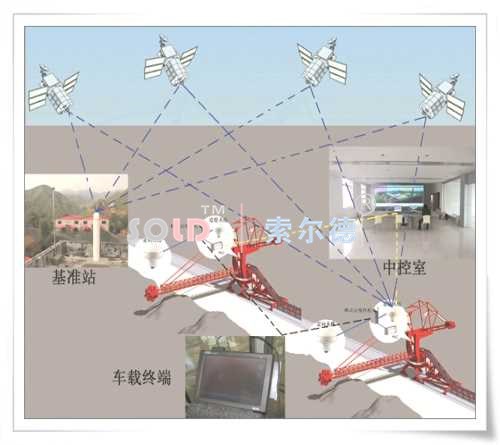
GPS定位系统1GNSS系统组成GPS是全球卫星导航系统的总称,包括GPS(美国)、GLONASS(俄罗斯)、伽利略(欧盟)、北斗(中国)总共四套导航系统。而目前在轨运行并能真正实现民用定位功能的只有GPS和GLONASS两套定位系统!主要特点:具有全球覆盖、全天候、实时导航定位等优点!2GPS系统介绍GPS系统主要由三部分构成:空间卫星部分、地面监控部分、用户GNSS接收机部分!卫星部分主要是再轨运行的专门用于导航的卫星,目前GPS和GLONASS在轨运行的卫星总共有60多颗,每颗卫星均在不间断地向地球播发调制在两个频段上的卫星信号!
它可实现多台堆取料机同场同时作业,提高同场安全作业效率高达80%左右,且可以实现无人操作!GPS定位系统包括:参考jizhan系统、流动站子系统、地面控制室通讯系统!参考jizhan系统基准站系统给各台堆取料机提供差分数据,是整个系统的控制部分.其工作原理是基准站卫星jieshou机将自己获取的定位数据,通过光纤模式、电台、GPRS或WIFI方式将差分数据发送到堆取料机的卫星jieshou机上;卫星jieshou机通过将自身的定位数据和基准站的差分数据进行差分解算,得到厘米级定位数据.

山西立体仓库物流管理系统厂家_索尔德自动化成套控制系统推荐-武汉索尔德测控技术有限公司
陕西库房物流管理系统厂家客服_索尔德自动化成套控制系统厂家-武汉索尔德测控技术有限公司
安徽GPS定位

浙江天车物流管理系统制造厂家_冷轧车间自动化成套控制系统-武汉索尔德测控技术有限公司
传统堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光测距传感器、行走限位开关、RFID方式!这几种传感器在检测位置时多数灵敏度低、寿命短、故障率高、可靠性低,操作繁锁,而且存在溜放环节(即失控区),致使半自动操作和全自动操作难以可靠稳定运行!通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高,无法有效解决同一个场垛中两台堆取料机的防碰撞以及同时作业的问题!
它的特点主要表现在以下方面:堆取料机走行位置、装卸位置检测;可实现堆取料机自动走行,自动堆取料;实现位置联锁,可以防止两端掉道或碰撞事故;与堆取料机小皮带联锁控制,防止混料、错料、堵料事故;可进行鳞状堆积预混匀作业,以提高原料成分的均匀度、减少粒度偏析;实现堆取料机远程监控功能;结合皮带秤数据对堆场堆存量数字化管理;严格控制堆料形状和取料规律,可以大大提高料场的存储容量,提高料场的利用率变起点定终点工艺可将料堆截面堆成长方形,减少端部料的产生和浪费,也同时减少铲车进场的作业量.
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09

 粤公网安备44030402000848号
粤公网安备44030402000848号