

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09



湖北混匀料场堆取料机无人化供应厂家_沙钢堆取料机无人化相关-武汉索尔德测控技术有限公司
- 产品名:堆取料无人操作系统
- 产品价格:3000.00
- 尺寸:
- 产地:
- 公司:
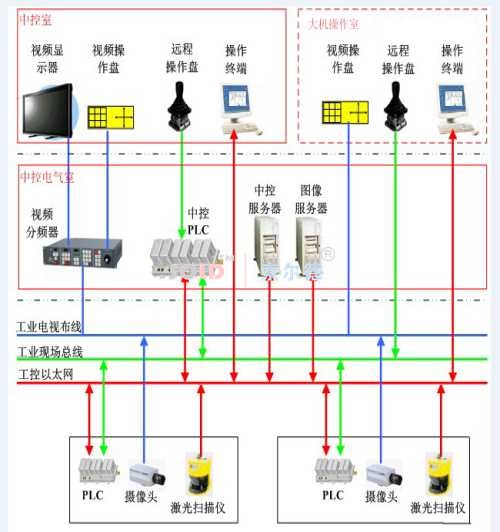
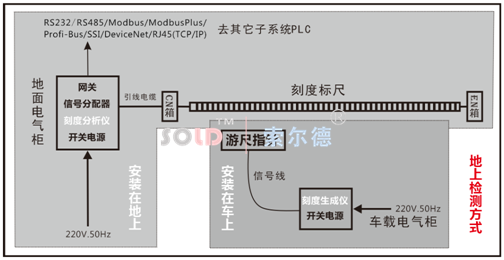
采用PLC控制系统,变频调速,辅助检测设备(料堆扫描仪、位置检测装置、工控机,皮带检测,摄像头装置等)来实现堆取料机的自动控制;堆取料自动控制中采用现场ControlNet,总线和工业以太网总线方式进行数据交换;三维数据采集模块!负责堆取料机的实时位置信息的采集、激光扫描装置的实时数据的采集,并将采集来的数据进行初步处理,形成料堆表面的三维点云数据.三维数据计算模块!负责接三维采集模块形成的点云数据,根据点云数据重构料堆的三维模型数据库等!
武汉索尔德测控技术有限公司坐落于武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,是湖北武汉洪山区知名企业,公司业务联系人经理:13277934095, 期待您的来电咨询更多关于堆取料机无人化相关信息!
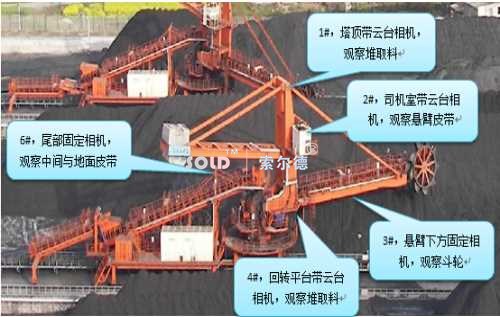
本项目具有以下现实意义:改善劳动环境和降低劳动强度减少人为因素的影响和人力投入提高堆、取料机的自动化作业程度并稳定生产运行提高码头整体智能化作业管理水平保持行业技术前沿性!对于单机全自动系统而言,全自动化的硬件控制设备都在堆取料机中,主要包括PLC、激光料堆扫描,实时大机行走定位,俯仰角测量,旋臂角度测量各类辅助装置等;料堆扫描装置完成料堆原始三维数据及预处理,通过处理后的数据形成实时的模型;根据对取料机控制策略,完成斗轮堆取料机自动作业;堆取料机异常状态检测,防止碰撞、过载等异常情况的发生;控制中心设置人工干预装置如手柄操作盘等,当堆取料机工作出现异常时,可以进行人工干预,主要包括停机,暂停堆取料、大车后退、大臂旋转等操作;单机PLC作为控制中心,需根据主控PLC传送过来的堆取料任务的范围,实现堆取料的逻辑控制及其操作的实现!
北京智能堆取料机定位系统价格_专业自动化成套控制系统-武汉索尔德测控技术有限公司
安徽耐酸碱天车定位系统生产厂家_高炉天车定位系统相关-武汉索尔德测控技术有限公司
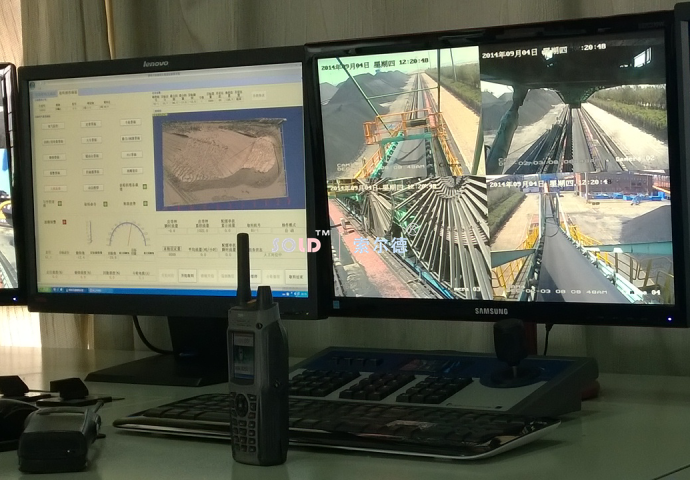
控制机从管理机获得作业计划或者自行编制作业计划,根据作业料堆在料场中的三维空间形状数据,结合堆取料机的物理尺寸数据,通过优化计算获得堆取料机的取料或堆料位置,形成作业指令,将作业指令发送到相应的堆取料机PLC,中控操作人员确认作业任务(作业料堆、作业料种、作业吨位等)正确和环境安全因素后,由堆取料机进行无人驾驶的堆、取料作业。在堆取料过程中,中控操作人员可以通过监控终端和视频终端实时监视现场作业过程,必要时可以通过位于控制室的操作台对堆、取料作业进行手动干预和作业调整.
GNSS三维坐标位置检测系统可提供堆取料机走行定位系统输出的走行值;根据当前时刻激光扫描数据与堆取料机走行定位系统的位置信息产生对应关系,将当前时刻料堆表面被测点的一组数据从激光扫描装置坐标系下转换成料场坐标系下;在料场坐标系下,料堆表面一个被测点坐标值中的x、y值为被测点在料场平面的两维坐标位置,被测点Z值为对应此x、y值时被测点的高度值!网格规范化处理过程是,对激光扫描装置采集的所有测量点坐标值进行均匀网格化处理,即在料场平面坐标下,在料场长度和宽度范围内沿轨道方向即Y轴、和沿垂直轨道方向即X轴,每间隔一定距离对整个料场进行等分,这样在料场的有效堆放范围内形成一个个大小面积相等均匀分布的网格,实现料场的数字化分割;对测量点落在网格中的点数量进行规范化整合处理,保证每个网格只对应一个坐标值;如果落在同一网格内有多个测量点数据,则对这些测量点的高度Z求平均值作为网格点的Z值,且规定网格点的x、y坐标为每个网格中心,最后以新坐标点作为落在此网格内的测量点坐标;规范化处理后的网格在数学上可以表示为一个矩阵,在计算机实现中则是一个二维数组;每个网格单元或数组的一个元素,对应一个高度值。
湖北天车定位系统制造厂家_天车的定位系统相关-武汉索尔德测控技术有限公司
湖北混匀料场堆取料机无人化供应厂家
三维数据接口模块!负责三维数据计算模块与计算机主控程序间的通信。计算机主控模块。负责自动堆取料全过程中的控制,包括根据作业任务生产控制指令,堆取料过程中的控制与修正,取料切入点的计算,大车寸动,取料效率的提高等。主控PLC数据通信模块!负责PLC控制系统的定时,事件触发,请求等数据通信.激光扫描仪控制模块!负责驱动激光扫描仪的转动,远程配置等!堆取料机的PLC控制模块.负责接收作业任务,并根据作业任务自动完成堆取料作业,包括堆取料机的自动对位,堆取料过程中的大车寸动,取料过程中的切入点的控制,恒流量控制,软、硬件防碰撞控制,人工远程干预的实现等.
堆取料机走行、俯仰、回旋刻度标尺的数据刷新与激光扫描装置的数据刷新两者的数据匹配原则是以激光扫描数据的时间为准,用接近该时间的刻度标尺数据去匹配激光扫描数据,这样每个时刻激光扫描数据都与刻度标尺的信息建立了对应关系!数据坐标化处理过程是,首先以激光扫描装置为原点建立坐标系,某一时刻来自激光扫描装置的距离值和对应的发射角度值放入此坐标系下;随后对应料场建立料场坐标系,沿堆取料机走行轨道方向作为Y轴,平行料场地面并垂直轨道方向为X轴,垂直料场地面方向为Z轴;料场坐标系的原点与堆取料机走行值的原点重合,以堆取料机俯仰轴中心作为相对基点;安装于堆取料机悬臂上的激光扫描装置在当前时刻在料场坐标系下的空间坐标光扫描装置到相对基点的空间距当前时刻俯仰刻度标尺输出的俯仰角度值,回转刻度标尺输出的回转角度值,激光扫描装置在俯仰角度为0度时相对于地面的高度!中国内陆目前没有一座核电站。中国科协年会“核能开发与内陆核电建设专家论坛”上,中国核工业集团公司潘自强院士提出希望:“十一五”末开始建设内陆第一个核电站。 湖北正力争成为内陆第一个建设核电的省份。湖北省核电办主任肖运保介绍,咸宁通山县城东北的大畈镇,被确定为湖北核电首选厂址。2005年10月,大畈核电项目向国家发改委上报项目建议书,是内陆地区第一个上报核电项目建议书的省份。目前该项目整体进度居于全国内陆核电项目前期工作前列。
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号