

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09




四川斗轮机GPS定位优选供应商_汽车安装gps定位相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
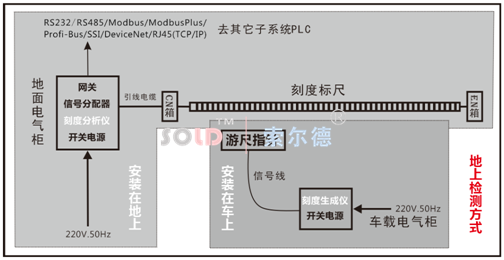
光电编码器装置,整套装置安装在驱动电机前部的一个金属壳体内,由盘状齿轮与定位车齿条啮合,通过驱动轴驱动编码器。盘状齿轮的圆周与定位车驱动小齿轮的圆周相同!编码器由传动齿轮自下而上通过减速机、联轴节驱动,实现定位车的位置检测!这几种检测位置的方式均存在一定缺陷,具体表现如下:1)人眼定位受制于眼睛健康状况和精神状态,环境影响比较大,作业时间长;2)光电编码器装置在车轮打滑就会形成累计误差,相对定位的机械接触工作方式;3)激光位移传感器在不洁净环境会失去作用,轨道沉降导致车辆走行抖动会使反光板靶位不准,亦会导致位置检测不准;4)行走限位开关由于是点定位,对连续性位置检测存在盲区;5)RFID方式是无线点定位,存在漏读现象,延时较大;故这几种传感器在检测位置时多数为机械式、灵敏度低、寿命短、故障率高、可靠性低,操作繁锁,而且存在溜放环节(即失控区),致使半自动操作难以可靠稳定运行。
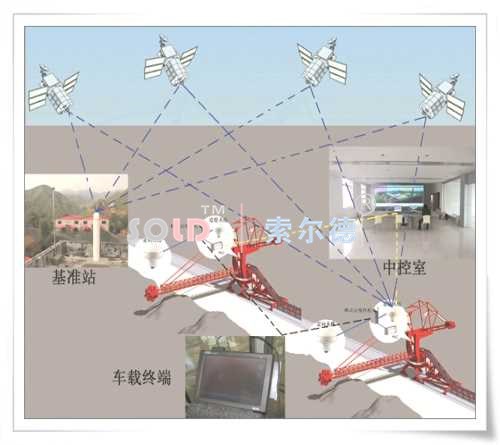
基准站差分系统主要包括基准站GPS卫星jieshou机和差分数据电台!基准站作为整个系统的基准必须建立在一个干扰少,基础稳定的位置,以便保证整个系统的定位精度以及全天候使用!一般来说基准站系统建立空旷的房屋楼顶上,单独建立立柱必须做好防雷措施!流动站子系统在每台堆取料机上安装两台流动站,流动站卫星jieshou机天线分别安放在大机回转中心和悬臂中部或者头部中心点处.两台流动站实时检测空间的三维坐标信息,并计算出每台堆取料机的位置、俯仰、角度信息等,并通过数据链路传输给中控室的PLC主机,这样根据“两点确定一条直线”原理,中控PLC就可以实时的知道堆取料机的大机回转中心和堆取料机的悬臂头部中心所在轴线的位置了!
四川斗轮机GPS定位优选供应商

静海自动物流管理系统制造厂家-武汉索尔德测控技术有限公司
由于堆取料机是较大的设备,其惯性较大,在启动和停止时也是硬性的,所以在工作过程中会产生很大的撞击和震动,噪音污染严重,严重影响其安全性和有关零部件的寿命,易于损坏设备,由此设备位置控制显得尤为重要!3悬臂采用的检测技术通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高.
GPS定位系统1GNSS系统组成GPS是全球卫星导航系统的总称,包括GPS(美国)、GLONASS(俄罗斯)、伽利略(欧盟)、北斗(中国)总共四套导航系统.而目前在轨运行并能真正实现民用定位功能的只有GPS和GLONASS两套定位系统!主要特点:具有全球覆盖、全天候、实时导航定位等优点.2GPS系统介绍GPS系统主要由三部分构成:空间卫星部分、地面监控部分、用户GNSS接收机部分!卫星部分主要是再轨运行的专门用于导航的卫星,目前GPS和GLONASS在轨运行的卫星总共有60多颗,每颗卫星均在不间断地向地球播发调制在两个频段上的卫星信号!
如果您想了解GPS定位系统更多信息,请致电 经理:13277934095,或者您直接到我们公司总部一起交流研讨,地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室,我们期待您的致电或来访。
并对相邻的堆取料机进行两两比较,计算出他们之间的安全距离,臂架俯仰和旋转的角度!一旦相邻的堆取料机之间的距离小于安全距离或旋转、俯仰角度超出安全角度时,软件将自动向操作人员发出报警信息以及停机信号,防止意外事故的发生.通过RTK方式来检测悬臂位置信息可以到厘米级,并且不受自身行车轮打滑和其它编码器累积误差的影响,比现有的防碰撞方法更加准确。克服了现有技术中由于悬臂空间位置反馈都是采用行走、旋转、俯仰三个编码器的数值计算,而造成的误差累积问题!

吉林专业环冷小车定位系统_高可靠性自动化成套控制系统售后服务商-武汉索尔德测控技术有限公司
静海索尔德物流管理系统供应-武汉索尔德测控技术有限公司

安徽露天设备GPS定位防碰撞系统_汽车在线gps定位相关-武汉索尔德测控技术有限公司
北斗 GPS双模,是指定位终端既可以支持北斗卫星定位,也可以支持GPS卫星定位。在更严格的定义上,是可以支持两套系统同时在定位终端上运行,帮助终端进行定位。SKYLAB就有北斗 GPS双模定位模块。双卫星系统为您服务,能够更快更准确的定位和导航。
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09


 粤公网安备44030402000848号
粤公网安备44030402000848号