

 武汉索尔德测控技术有限公司
武汉索尔德测控技术有限公司
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09



浙江斗轮机GPS定位商家_室内gps定位相关-武汉索尔德测控技术有限公司
- 产品名:GPS定位系统
- 产品价格:面议
- 尺寸:索尔德
- 产地:武汉
- 公司:索尔德
由于堆取料机是较大的设备,其惯性较大,在启动和停止时也是硬性的,所以在工作过程中会产生很大的撞击和震动,噪音污染严重,严重影响其安全性和有关零部件的寿命,易于损坏设备,由此设备位置控制显得尤为重要!3悬臂采用的检测技术通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高。
武汉索尔德测控技术有限公司,位于武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室。公司主营自动化成套控制系统行业,如何了解{推广产品}产品信息详情请拔打热线:13277934095经理。
我公司是专业从事物料搬运设备定位和控制的民营高科技企业,为用户提供专业技术咨询、技术资料、方案设计、包装运输、设备点交、安装指导、技术培训、回访服务等。为了解决客户后顾之忧,本公司特推行“四制四服务”的售后服务制度:四项制度1)30分钟内回复制:接到客户电话起30分钟内做出回应!2)24小时到场制:需要现场解决问题的我公司售后技术工程师在24小时内到达现场。3)终身服务制:对我公司产品实行终身售后服务!

江苏自动环冷小车定位系统易于维护_索尔德自动化成套控制系统-武汉索尔德测控技术有限公司
浙江圆形料场GPS定位易于维护_车辆GPS定位相关-武汉索尔德测控技术有限公司

云南钢卷库物流管理系统供应厂家_桥式起重机自动化成套控制系统-武汉索尔德测控技术有限公司
浙江斗轮机GPS定位商家
它的特点主要表现在以下方面:堆取料机走行位置、装卸位置检测;可实现堆取料机自动走行,自动堆取料;实现位置联锁,可以防止两端掉道或碰撞事故;与堆取料机小皮带联锁控制,防止混料、错料、堵料事故;可进行鳞状堆积预混匀作业,以提高原料成分的均匀度、减少粒度偏析;实现堆取料机远程监控功能;结合皮带秤数据对堆场堆存量数字化管理;严格控制堆料形状和取料规律,可以大大提高料场的存储容量,提高料场的利用率变起点定终点工艺可将料堆截面堆成长方形,减少端部料的产生和浪费,也同时减少铲车进场的作业量!
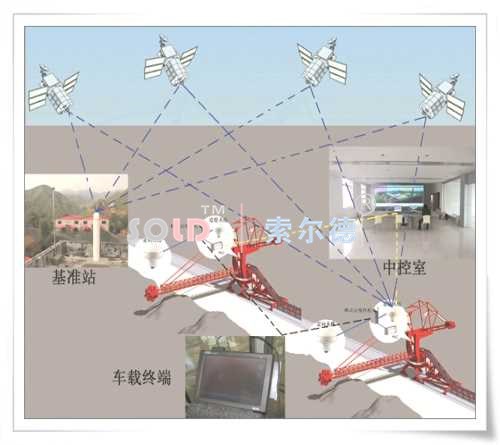
4本系统采用的GPS定位技术本系统采用在堆场合适位置建立基准站,在堆取料机的回转中心和悬臂中部或者头部中心点安装GPS流动站。通过GPS的位置信息和空间几何算法,得出两台堆取料机之间的距离,从而可以判断出堆取料机发生碰撞的可能性,使得作业人员进行相应处理!本系统可以实时计算出堆取料机悬臂的相对位置和距离,实现多台堆取料机在同一个场垛中安全作业。该系统包括:大机及悬臂位置反馈系统、空间数据算法系统、空间防碰撞预警控制系统.
系统简介1概述随着水路运输业的快速发展,现代港口规模和吞吐量不断增长,港口各种装卸设备数量不断增加,如何可靠使用这些装卸设备是各港口单位关心的问题。港口装卸设备中主要的斗轮堆取料机又称悬臂式堆取料机,是散货堆场作业的核心设备!它是堆取料合一的机械,即是一种挖取和堆存煤炭、矿石、砂石等松散物料的机械!它不仅适用于电厂,而且在码头、港口也很适用,大多数的转运煤及松散物料的码头、港口都采用斗轮堆取料机.斗轮堆取料机的采用,大大缩短了堆取时间,提高了工作效率,减轻了工人劳动强度!
山东烧结环冷小车定位系统安装-武汉索尔德测控技术有限公司

山西智能环冷小车定位系统售后服务商_高可靠性自动化成套控制系统安装-武汉索尔德测控技术有限公司
传统堆取料机位置检测大多采用的是人眼定位、光电编码器装置(光码盘)、激光测距传感器、行走限位开关、RFID方式。这几种传感器在检测位置时多数灵敏度低、寿命短、故障率高、可靠性低,操作繁锁,而且存在溜放环节(即失控区),致使半自动操作和全自动操作难以可靠稳定运行!通常的悬臂空间位置反馈都是采用行走、旋转、俯仰三个旋转编码器的数值计算得出的,对悬臂的空间位置计算过程非常复杂,该计算过程需要结合行走、俯仰、旋转三个编码器的数值进行空间建模,而这三个编码器都有不同程度的误差,这就造成累积误差,故悬臂空间坐标的准确性不高,无法有效解决同一个场垛中两台堆取料机的防碰撞以及同时作业的问题!
自动化成套控制系统
公司地址:武汉市东湖新技术开发区高新四路40号葛洲坝太阳城3栋5层04室
企业信息
注册资本:1000万以上
注册时间: 2014-12-09



 粤公网安备44030402000848号
粤公网安备44030402000848号