

 深圳旭达通智能科技有限公司
深圳旭达通智能科技有限公司
电感线圈
公司地址:广东省深圳市龙岗区龙城街道京基御景时代大厦南区4楼
企业信息
注册资本:50---100万
注册时间: 2017-04-17



北京专业微波雷达价格_雷达模块多少钱相关-深圳旭达通智能科技有限公司
- 产品名:雷达传感器
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
3、人走动快慢,测试的感应距离差异很大,为什么?人走动速度的快慢,产生的多普勒频移不同,速度快的频率较高,在我们默认的滤波方案中被滤除较多,故感应相对不灵敏!后续芯片方案在开发FFT算法,可以保留更多的有用信号!4、做了一款板子,为什么有的特别好,有的疯狂误触发,而有的感应距离特别近呢?这不符合常理啊?这种情况我怎么解决?实际上这三种情况是属于同一种原因.这是因为这款板子的噪声比较大,故而有的特别容易就触发了,而噪声大到一定程度,会导致我们芯片的TIA信号饱和,饱和后就需要几乎手摸到模块这么近才会引起模块有感应!

武汉太阳能灯雷达模块加工_光电传感器-深圳旭达通智能科技有限公司
可以通过增加电源滤波电容、模块远离重要干扰源、软件算法针对性的优化、降低模块发射功率、改善PCB走线、硬件上用隔离方案等来消除这些影响。注意事项1、安装时天线正面应避免有金属材质的外壳或部件,以免屏蔽信号,允许有塑料或玻璃等遮挡物,但遮挡物不要紧贴天线前方;2、尽量避免将雷达天线方向正对着大型金属设备或管道等;3、多个雷达模块安装时,应尽量保证各雷达模块的天线相互平行,避免各天线间正对照射,并且模块与模块间保持1m以上间距;4、雷达传感器应避免正对交流驱动电源,尽量远离驱动电源的整流桥,以免工频干扰雷达信号;5、雷达模块的供电电源驱动能力需要大于50mA,否则将引起传感器工作异常。
深圳走廊灯微波雷达模块定做_5.8G声波传感器-深圳旭达通智能科技有限公司
8G雷达方案人如果不动是否可以检测的到?目前暂时无法实现(1)因目前的5。8G雷达方案是基于多普勒效应对运动物体进行检测,如果被检查的物体相对雷达无相对移动、理论上是检测不到的.(2)人静止不动只是相对来说、其实人的呼吸及心跳还是可以通过算法检测的出来的,即所谓的存在感应;只是目前的5.8G方案暂时还无法做到。8、为什么在整机里面自激、不灭现象很严重?怎么改善?模块由于在密闭的空间,里面的杂波干扰很严重,这个大多是由于客户的电源不干净引起的!

北京农业雷达传感器安装_雷达传感器厂家价格相关-深圳旭达通智能科技有限公司
所以看起来2个极端的三种情况,其真正原因是一样的!这种情况下,需要在软件里减小TIA增益,使其不再误触发,在此基础上再调ADCdelta到合适的值.不过要从根本上解决问题,还是要看这个板子设计上出了什么问题,从设计上更改!5、雷达感应波形大小和什么有关?感应波形和很多因素有关,雷达自身方面如发射功率,天线效率,接收增益等.在雷达自身条件固定条件下,感应到的波形大小和运动物体的大小成正比;和运动物体与雷达之间的距离成反比;另外和环境也有一定关系,狭窄的空间信号多反射,相对空旷的空间感应到的信号会大一些!
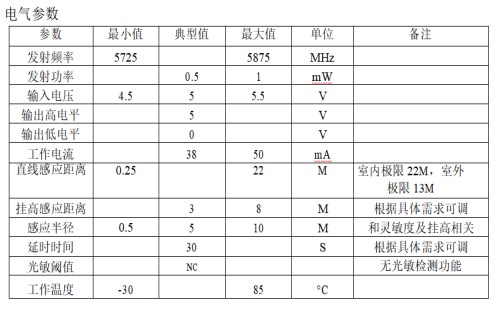
RX和TX也可用UART口来调谐模块参数,当用作串口时,其详细使用说明参见文档《AirtouchRadarSettingTool使用说明》!模块上电时序图模块有上电自检功能,即模块上电后,OUT脚先输出高电平,延迟1S后输出低电平,低电平延迟1S后进入正常感应模式,以下是模块上电后控制信号的时序图:探测范围示意图雷达传感器的感应灵敏度可通过MCU来配置,其极限感应距离8米,实际感应距离可根据需要适当调节。
感应时间及感应距离调节XDT-P2014默认需要3个插针,分别是VCC、GND和OUT,此时感应延时和感应距离为固定值,如需调节感应延时和感应距离等相关参数,硬件上需要增加图3所示RX和TX两个PIN引出来。软件配置上,RX和TX可作为I/O口或当作UART口来调谐模块参数,软件默认将这两个PIN作为I/O口,其中TX用来调谐感应距离,TX为低电平时感应距离4~6米,为高电平时感应距离3~5米;RX用来调谐延迟时间,RX为低电平时感应延迟时间为30S,为高电平时延迟时间2S,在延迟时间内再次触发感应,会重新开始计时.
北京专业微波雷达价格
6、在某些环境下模块的发热效果很严重,是否会影响性能?芯片有做过高温测试,在80℃的情况下工作基本不会受影响!一般在5V供电的情况下,特别是在球泡灯上面热的特别厉害,但是老化测试下来性能基本上不会受影响!如果模块板子上面有额外输入的LDO,那么会增加板子的温度,温度一高可能会影响模块LDO的供电等情况,从而导致模块工作异常:常亮或无感应的现象发生.针对这个问题,可以通过选用散热好的LDO来改善.7、目前的5.
公司是一家以声波传感器为主的企业,主打微波雷达,更多产品详详情请拨打电话:13418885103延 或到访广东省深圳市龙岗区龙城街道京基御景时代大厦南区4楼。深圳旭达通智能科技有限公司期待与您一起合作共赢,在追求低价格高效率,快速度的同时,更注重质量的保证,努力为客户做好每一件产品,做到在成长中求发展,始终保持一种尽善尽美的工作态度,满怀希望和热情的朝着目标努力。

宁波雷达传感器批发_雷达传感器厂家价格相关-深圳旭达通智能科技有限公司
由上式可知,要测量A、B距离实际上是要测量光传播的时间t,根据测量时间方法的不同,激光测距仪通常可分为脉冲式和相位式两种测量形式。 相位式激光测距仪 相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。
即用间接方法测定出光经往返测线所需的时间,相位式激光测距仪一般应用在精密测距中。由于其精度高,一般为毫米级,为了有效的反射信号,并使测定的目标限制在与仪器精度相称的某一特定点上,对这种测距仪都配置了被称为合作目标的反射镜。 若调制光角频率为ω,在待测量距离D上往返一次产生的相位延迟为φ,则对应时间t 可表示为:t=φ/ω将此关系代入(3-6)式距离D可表示为 D=1/2 ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ) =c/4f (N+ΔN)=U(N+) 式中:φ——信号往返测线一次产生的总的相位延迟。
ω——调制信号的角频率,ω=2πf。 U——单位长度,数值等于1/4调制波长 N——测线所包含调制半波长个数。 Δφ——信号往返测线一次产生相位延迟不足π部分。 ΔN——测线所包含调制波不足半波长的小数部分。 ΔN=φ/ω 在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。
为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用*多的是延迟测相和数字测相,目前短程激光测距仪均采用数字测相原理来求得φ。 由上所述一般情况下相位式激光测距仪使用连续发射带调制信号的激光束,为了获得测距高精度还需配置合作目标,而目前推出的手持式激光测距仪是脉冲式激光测距仪中又一新型测距仪,它不仅体积小、重量轻,还采用数字测相脉冲展宽细分技术,无需合作目标即可达到毫米级精度,测程已经超过100m,且能快速准确地直接显示距离。
是短程精度精密工程测量、房屋建筑面积测量中*新型的长度计量标准器具。现应用*多的是leica公司生产的DISTO系列手持式激光测距仪。 手持式激光测距仪使用注意事项 DISTO及其他手持式激光测距仪,由于采用激光进行距离测量,而脉冲激光束是能量非常集中的单色光源,所以在使用时不要用眼对准发射口直视,也不要用瞄准望远镜观察光滑反射面,以免伤害人的眼睛。
一定要按仪器说明书中安全操作规范进行测量。野外测量时不可将仪器发射口直接对准太阳以免烧坏仪器光敏元件。以上以DISTO仪器为例简要介绍了仪器部分测量功能,不同厂家生产的手持式激光测距仪功能键略有异同,但只要认真阅读使用说明书,就会充分发挥手持式激光测距仪在房屋建筑面积测量和其他精密工程测量中的作用。
。
电感线圈
公司地址:广东省深圳市龙岗区龙城街道京基御景时代大厦南区4楼
企业信息
注册资本:50---100万
注册时间: 2017-04-17

 粤公网安备44030402000848号
粤公网安备44030402000848号