

 东莞市嘉腾仪器仪表有限公司
东莞市嘉腾仪器仪表有限公司
商务服务
公司地址:东城街道松浪街28号
企业信息
注册资本:200--500万
注册时间: 2005-04-06






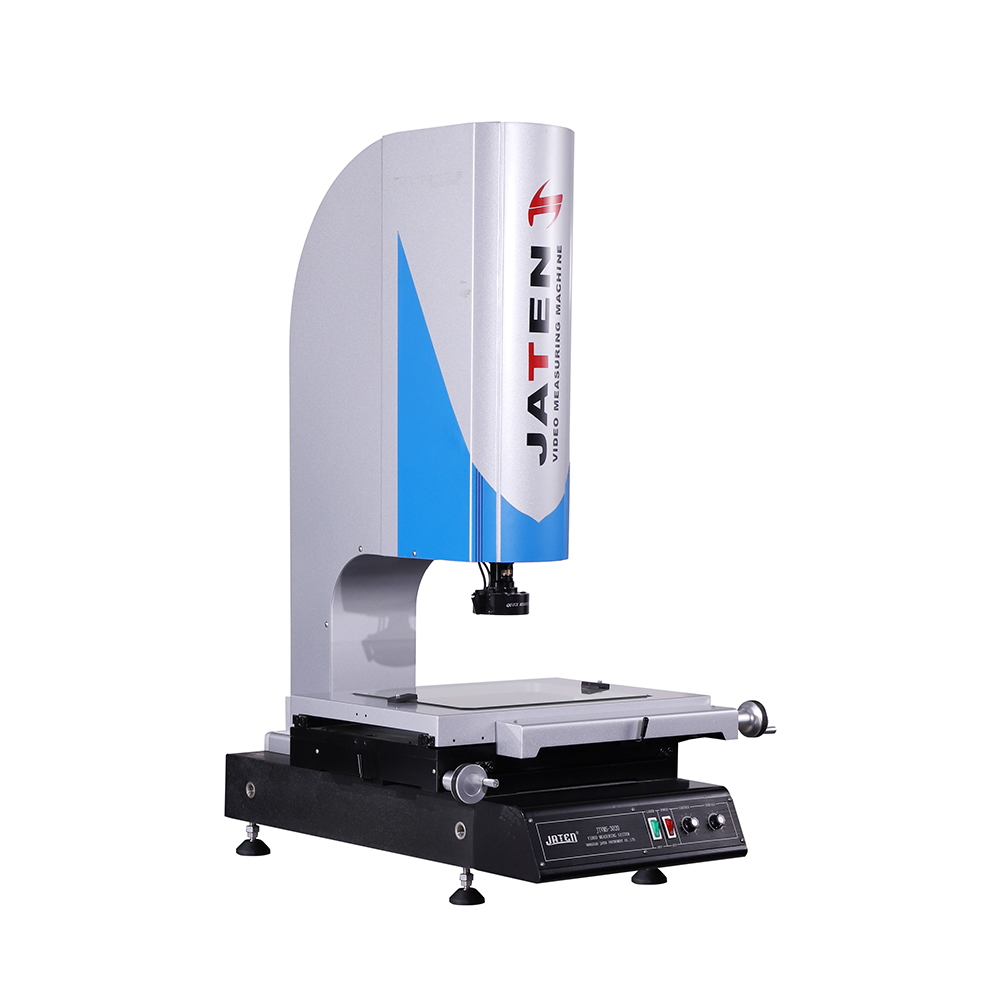
影像测量仪生产厂家_佛山口碑好的影像测量仪系统_东莞市嘉腾仪器仪表有限公司
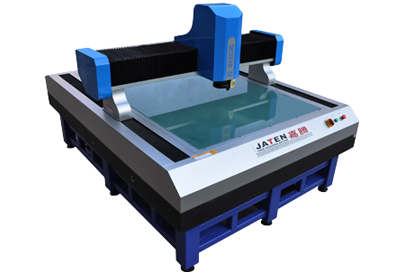
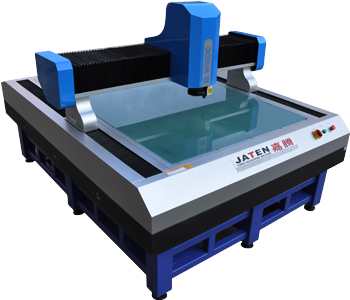
- 产品名:龙门式全自动影像仪
- 产品价格:面议
- 尺寸:
- 产地:
- 公司:
光源发出光线照亮工件,相机在镜头的配合下采集工件的影像,然后将影像数据传输给图像处理与测量软件.软件对影像进行处理后,操作人员利用软件提供的测量工具,在影像上选取工件相关的特征元素(如轮廓边缘、孔的圆心等),软件依据相应的数学算法,根据这些元素在影像中的坐标位置等信息,计算出工件的几何参数测量结果,最终实现对工件的测量与质量评估!测量功能及应用场景仪器规格参数:仪器型号QVS-6050CNCQVS-7050CNC行程(mm)600×500×200700×500×200外形尺寸(mm)1740×1316×17601740×1416×1760承重(Kg)3030测量精度XY轴≤(3+L/200)umZ轴≤(4+L/200)um(可选配探针进行高度测量,光学测高误差≤(4+L/200)um,探针测高误差≤(3+L/200)um)光栅尺美国GSI高精度光栅尺,分辨率0!
直径和半径测量:对于圆形工件,无论是外圆还是内孔,都能有效测量其直径、半径,像在精密轴承生产中,准确测量轴承内外圈的直径尺寸,保证产品的互换性和旋转精度!角度测量:通过在影像上选取工件两条边对应的直线元素,软件可计算出它们之间的夹角,用于测量各类有角度要求的零部件,如机械加工中的斜齿轮的齿面夹角、模具型腔的拔模角度等,保证产品的工艺性和使用性能。形状测量:轮廓度测量:判断工件的实际轮廓与设计轮廓的符合程度,在模具制造领域应用广泛,例如检测模具型腔的轮廓度,看其是否存在偏差,以确保成型产品的形状精度,使最终产品能符合设计造型要求!

东莞市嘉腾仪器仪表有限公司,具体产品品牌可上我司网站上查询!质量保证 价格取胜 信誉地址:东城街道松浪街28号 我们将尽全力为您提供优惠的价格及快捷细致的服务,希望能对您的工作有所帮助!更多产品详情请联系:冠明 13266133017。
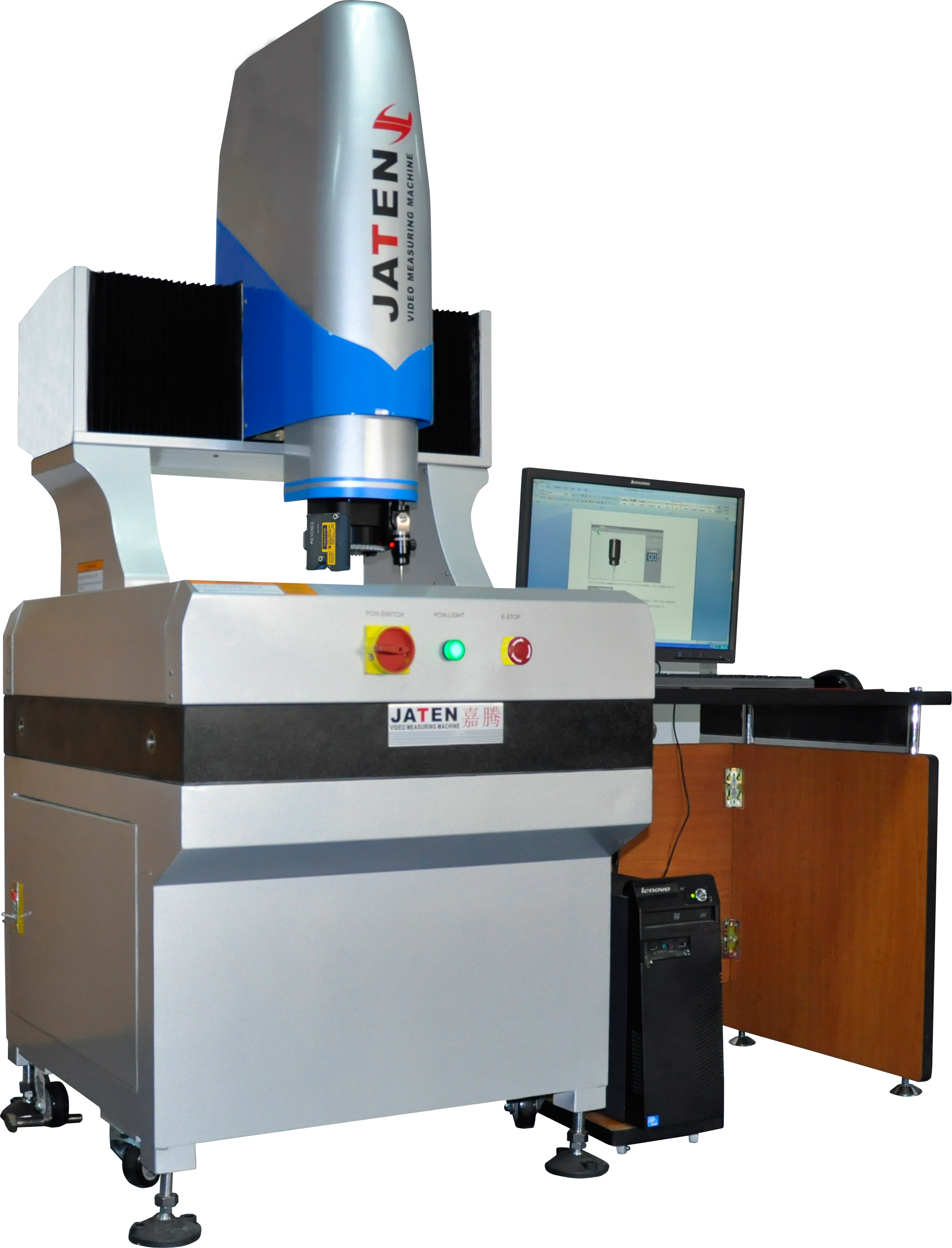
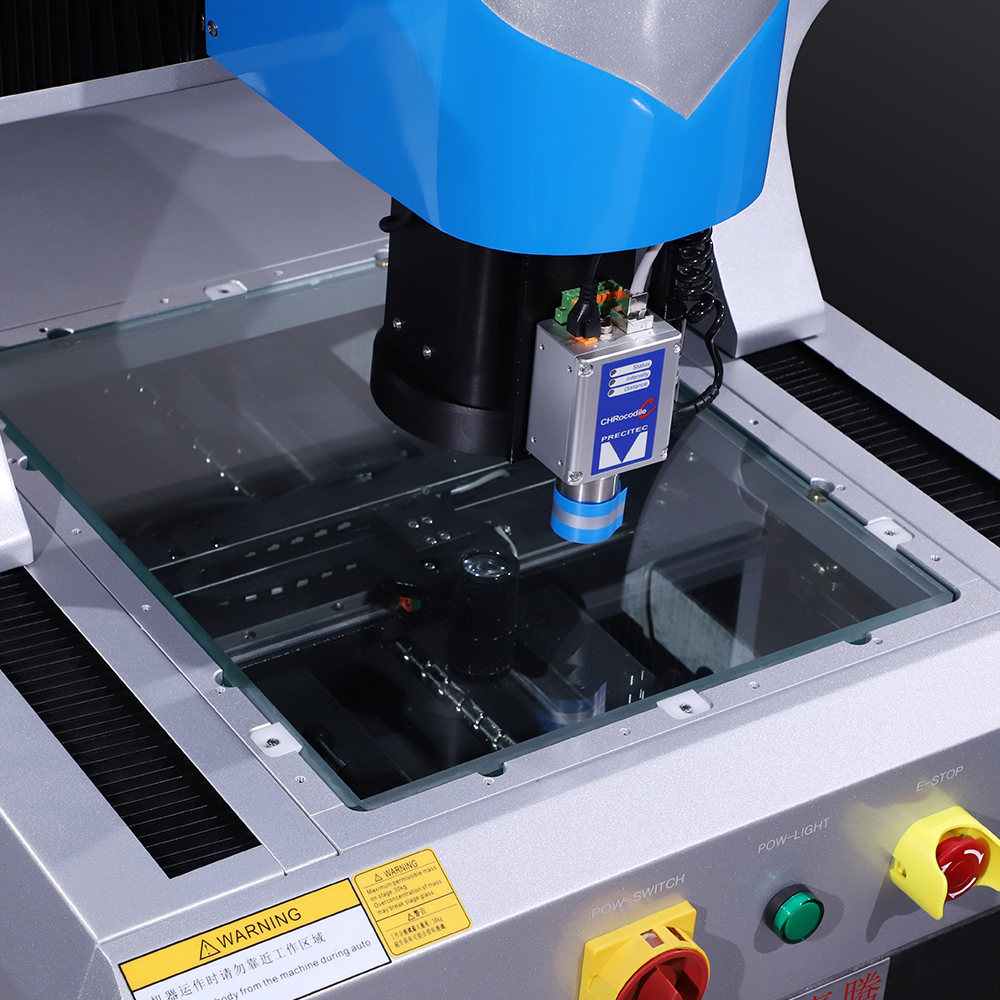
●精密研磨级滚珠螺杆和日本THK精密线性导轨,配日本松下伺服马达采用双重闭环运动控制,具有高速的定位以及运动的稳定性.●配高分辨率彩色摄像机,采用我公司自主研发的表面冷光源,表面光由独立四十八组光源组成,每一组均为恒流源驱动,连续可调,保证高品质的测量画面;●测量系统采用进口美国GSI高精度光学尺,分辨率为0.5um;●采用我公司开发的嵌入式模块控制电机,提高了电机响应速度,还简化了仪器与PC机的接口,PC机与仪器通过USB线和S端子线连接;★可选配英国Renishaw接触式探针,并配送ФФ2探针,搭配QuickMeasuring全自动影像测量软件,进行三次元测量!
影像测量仪生产厂家
图像处理与测量软件:图像采集与处理模块:接收相机传来的图像数据,进行去噪、增强、锐化等预处理操作,提高图像的质量,以便后续能更准确地识别和提取工件的特征信息!例如去除图像中的噪点干扰,使工件的边缘线条更加清晰锐利,便于进行测量!测量功能模块:基于处理后的清晰图像,提供多种测量工具和算法,可实现对工件的尺寸(如长度、宽度、直径等)、形状(如轮廓度、圆度、直线度等)、位置(如孔心距、同轴度等)等几何参数的测量!
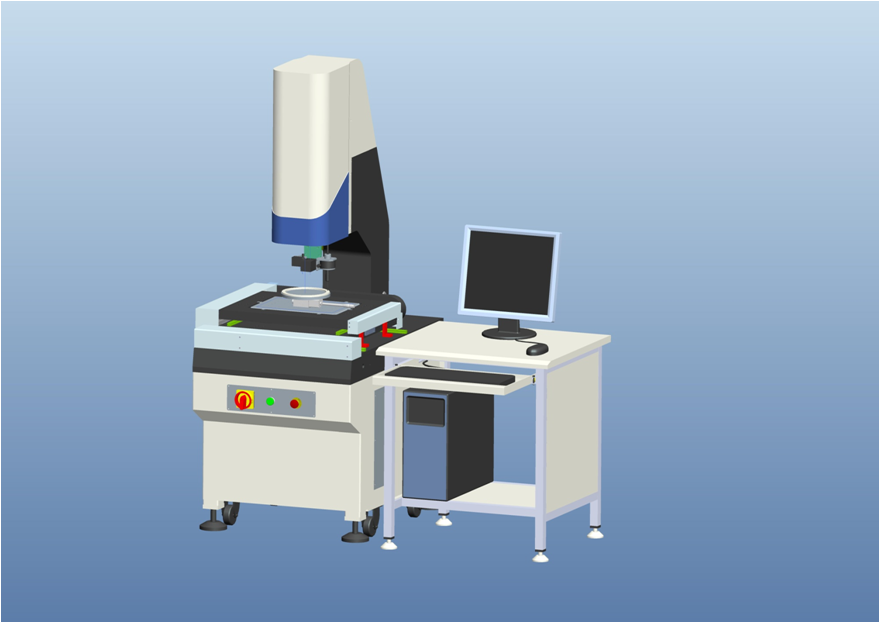
操作人员只需在软件界面上操作相应的测量工具,按照测量要求在图像上选取对应的点、线、面等元素,软件就能自动计算并输出测量结果,同时还能将测量结果与预设的公差范围进行对比,直观地判断工件是否合格!报告生成模块:能根据测量数据生成详细规范的测量报告,报告内容包括测量项目、测量结果、判定结论以及相关的图像截图等信息,方便质量控制人员、生产部门等进行存档、查阅以及产品质量分析。工作原理将被测工件放置在测量平台上,通过运动系统驱动平台及影像系统中的镜头等部件,使工件处于合适的测量位置并调整好合适的放大倍数及光照条件!
圆度测量:分析圆形工件的实际形状与理想圆的接近程度,在轴类、套类等众多有圆圆度要求的零件检测中起着重要作用,比如对汽车发动机曲轴的轴颈圆度进行检测,保障其旋转平稳性和使用寿命!直线度、平面度测量:观察影像上工件的线条是否笔直、平面是否平整,像对机床导轨、大型平板等要求高精度平面度的部件进行检测,确保其在安装和使用过程中的精度和稳定性,进而保障加工精度。优点与局限性优点:测量精度较高:凭借其高精度的影像系统、精密的运动系统以及先进的图像处理与测量软件,能够实现较高的测量精度,可满足大多数工业产品检测中对精度的要求,尤其对于一些微小尺寸和复杂形状工件的测量精度表现突出!
移相信号发生器是基于FPGA的直接数字频率合成(DDFS)双路输出信号源,可以产生20Hz到20KHz的精确频率和0到359度的精确相移。相位测量仪和数字式移相信号发生器有数码显示、液晶显示等良好的人机界面,性能指标优良。设计中采用了模块化设计方法,使用了多种EDA开发工具,提高了设计效率。
基于题目要求,本系统较好的完成了基本部分和发挥部分的全部要求。 设计方案: 1、测量方法:采用相位时间变换法,先测量出时间间隔和两同频正弦波的周期再换算为相位差。测量原理如下图所示: 如图所示,正弦信号变化一周是360º,U1信号比U2信号超前Δt时间过零点,U1超前U2的相位,即U1与U2的相位差φ的计算公式如下式: φ=(Δt / T)* 360º 式中:T为两同频正弦波的周期,Δt 为两正弦波过零点的时间差。
这种方法就是应用电子计数器来测量周期T和两同频信号过零点的时间差Δt,再按上述的计算公式φ=(Δt / T)* 360º计算出相位差。两路被测信号各经过一个过零比较器、限幅器转换为TTL方波信号。两路方波信号的相位差和频率也就是两被测同频信号的相位差和频率。
这两路方波信号经脉冲变换电路,一路输出与两同频信号周期等时间宽度的高电平脉冲周期信号如图1-4所示,另一路输出与两同频信号相位差对应的时间等时间宽度的高电平脉冲周期信号如图1-5所示。先用图1-4所示的高电平脉冲作计数器的闸门进行计数,设计数值为N。
后用图1-5所示的高电平脉冲作计数器的闸门进行计数,设计数值为n。 f=Fc / N φ=(n / N)*360º (公式1-6) 由计数值n和N通过计算公式1-6就可以求出相位差φ和频率f,式中Fc为计数频标的频率值。
采用这种测量方法的误差主要来源是标准频率误差、触发误差、量化误差。这种测量方法可以用数字化的方法实现。随着科技的进步,数字系统的工作频率越来越高,测量误差中的标准频率误差可以作的很小,量化误差对总误差的影响也会变的很小。而且采用数字化的测量方法可以做到人机界面友好,智能化,简化硬件,直接数字量显示便于读数,操作简便等。
因此,本系统采用相位时间变换法测量相位差。 2.系统设计方案 采用单片机与可编程逻辑器件结合的方法进行相位测量,可编程逻辑器件(CPLD)在相位差和信号周期对应的时间范围内进行计数,单片机从CPLD读回数据完成数据处理和数据显示。因为可编程逻辑器件的速度快,所以可以容易地达到题目中相位差绝对误差小于等于2度的要求,采用单片机进行数据处理与显示比较方便,可以比较容易的做到人机界面友好、仪器易于操作等。
这种方案兼顾了前两种方案的优点,因此本系统采用此方案。 。
商务服务
公司地址:东城街道松浪街28号
企业信息
注册资本:200--500万
注册时间: 2005-04-06


 粤公网安备44030402000848号
粤公网安备44030402000848号